基于ZigBee技術的角度同步采集傳輸系統設計

0 引言
關節臂式測量機廣泛用于模具、汽車零部件、鈑金件、塑料制品、木制品、雕塑等的快速檢測和逆向設計。其工作機理是:手持關節臂,帶動測量機頂端的攝像頭或探針掃描至目標探測點,根據測量機各段臂長和各個關節所轉過的角度可求取出目標探測點的位置或坐標。測量機的工作關鍵在于讀取和及時傳輸各個關節的角度信息。
普通的關節臂式測量機在每個關節內都安裝有一個角度編碼盤,角度信號通過連接在關節臂內的電纜線傳輸至工控機。由于編碼器使用有線方式傳輸角度信息,臂內電纜多,連續旋轉多圈時臂內電纜將擰成“麻花”,使得測量機關節不能無限旋轉。
本文所設計的“基于ZigBee技術的角度同步采集傳輸系統”,采用Microchip公司的PIC18LF4620微控制器和Chipcon公司的CC2420射頻芯片共同組成無線節點,置于關節臂式測量機的每個關節內,實現角度信號的讀取和無線傳輸。在工控機側,也安裝有一個無線節點,用于接收這些無線傳輸的角度信息并上傳給工控機。信號傳輸的無線化使得測量機的關節可以無限制旋轉。下面主要以六關節臂式測量機為例,介紹該系統的設計方案。
1.系統方案設計
整個系統實質上為一個由7個無線節點組成的星形無線網絡,如圖1所示。安裝在測量機6個關節內的無線節點分別和本關節內的角度編碼盤相連,采集編碼盤信息,并將提取出來的有效角度信息無線發送出去,構成星形網絡的6個網絡節點(以下稱為子節點)。作為網絡協調器的無線節點(以下稱為主節點)和工控機相連,采用時分復用的方式接收6個子節點無線傳輸的角度信息,經整理后通過串口發送給工控機。
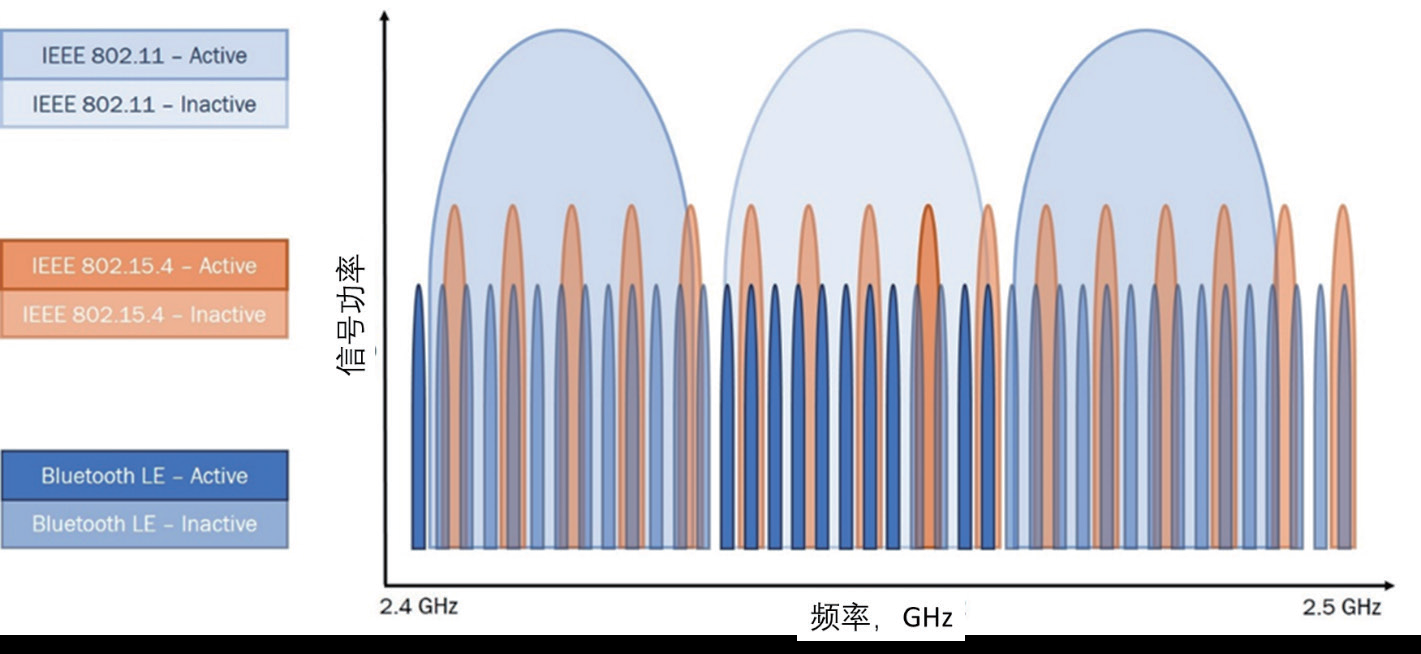
每個無線節點由控制模塊和射頻模塊組成。控制模塊主芯片是PIC18LF4620,最高工作頻率為40MHz,內含64kBytes的flash空間和4kBytes的RAM空間,外圍控制部分包括定時器模塊,捕捉/比較模塊,A/D轉換模塊,SPI接口和EUSART串口等,完成系統的控制和處理功能。射頻模塊用于實現信息無線收發,主芯片為CC2420,符合2.4 GHz IEEE 802.15.4協議,無線收發速率可達250kbps,無線收發功率僅為幾十毫瓦。
2.系統硬件結構及連接圖
系統的硬件連接圖如圖2所示,元件主要包括射頻芯片CC2420、微控制器PIC18LF4620和串口電平轉換芯片MAX3221。對外提供的接口為RS232/485串口(圖2中以RS232為例)。每個無線節點內部,控制模塊(PIC18LF4620)和射頻模塊(CC2420)通過SPI接口連接,主要包括串行數據輸出引腳(SDO)、 串行數據輸入(SDI)引腳和串行時鐘(SCK)引腳。對于主節點,微控制器的串口輸出引腳(TX)和串口輸入引腳(RX)經由電平轉換芯片MAX3221和工控機相連。對于子節點,微控制器通常通過RS232/RS485串口和編碼盤相連,具體接口視編碼盤型號而定。
3.組網過程
7個無線節點組成一個星形無線網絡,以主節點為協調器,6個子節點為網絡節點。組網的過程可以描述如下:
(1)將主節點和所有子節點的無線收發頻率置于同一信道,確保該信道上無其它無線設備。
(2)主節點無線發送組網廣播,告知同信道的所有處于接收狀態的無線設備(各子節點)自己為網絡協調器,并告知該網絡的PAN ID,以及主節點自己的64位MAC地址。同時,設定廣播報文的最大重傳次數,并開啟廣播超時定時器。
(3)各個子節點在接收到廣播之后回應一個網絡連接請求。
(4)當主節點收到子節點的網絡連接請求時,主節點給該子節點分配16位的網絡地址。
(5)定時器超時,主節點檢查是否收到了所有子節點的網絡連接請求。“是”則停止組網廣播,組網成功。“否”則重傳組網廣播,重傳次數減1。
(6)重復步驟(5),若重傳次數已經自減為0,停止組網廣播,組網結束,并告知工控機本次組網失敗。
4.數據傳輸
4.1幀格式定義
在本文所設計的星形無線網絡中,共分為物理層、MAC層和應用層3層,各層的幀格式如圖3所示。網間傳輸的信息從幀類型上分為3種,分別為數據幀、確認幀和命令幀,組網廣播幀和角度采集廣播歸屬于命令幀。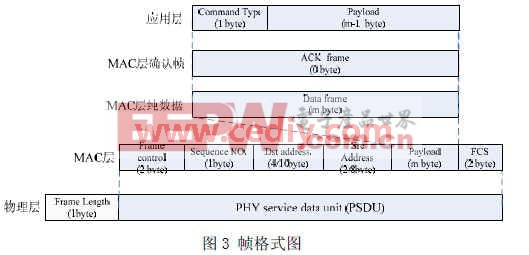
注:Frame Length為物理層幀長度;Frame Control域的低3位指示該信息的幀類型;Sequence NO.為序列號;FCS為校驗域。Command Type為命令類型,指示收到命令幀之后無線節點所需進行的操作。
4.2TDMA時隙分配和傳輸協議
主節點和各子節點采取時分復用TDMA的方式進行通信,每個子節點在指定的時隙內和主節點進行信息交互。在本文所設計的星型無線網絡中,共劃分有8個時隙,如圖4所示。







評論