基于MATLAB的高功率因數整流器仿真實驗平臺研究

簡單系統可直接建立模型,并分析模塊之間的相互關系以及模塊輸入輸出關系。但對相對復雜的系統,Simulink包含多個模塊,使得各個模塊之間的相互關系非常復雜,不利于分析。為此,可將具有一定功能的模塊群進行封裝,用戶不必了解其內部結構,只需了解其功能和輸入參數即可。而且每個模塊可移植。仿真實驗平臺封裝的主要模塊包括:典型的單相整流器主電路,三相全控橋整流器主電路,檢測模塊(坐標變換),脈沖產生模塊,控制模塊,測量模塊等。通過仿真得到三相可逆PWM整流器的主電路電感值、開關頻率等參數,并影響到輸入電流總諧波失真(THD)、電源功率因數以及系統輸出直流電壓,從而為實際設計確定主電路的參數提供可靠依據,對三相可逆PWM整流器設計具有實際意義。
2 模塊庫的建立
仿真平臺的建立是通過在Simulink Library Browser下面創建一個自己的模塊庫實現,新建庫名為kongde。用右鍵打開模塊庫,并將自己封裝的模塊添加到庫中。添加完所有模塊并保存之后,點擊Simulink Library Browser下面的kongcle,便顯示了該模塊庫中的所有模塊,如圖1所示。仿真時,只需將各個功能模塊從模塊庫中添加到模型文件中,設置相應的參數,并把各個功能模塊按照原理連接即可觀察結果。

3 模塊封裝
3.1 整流器主電路
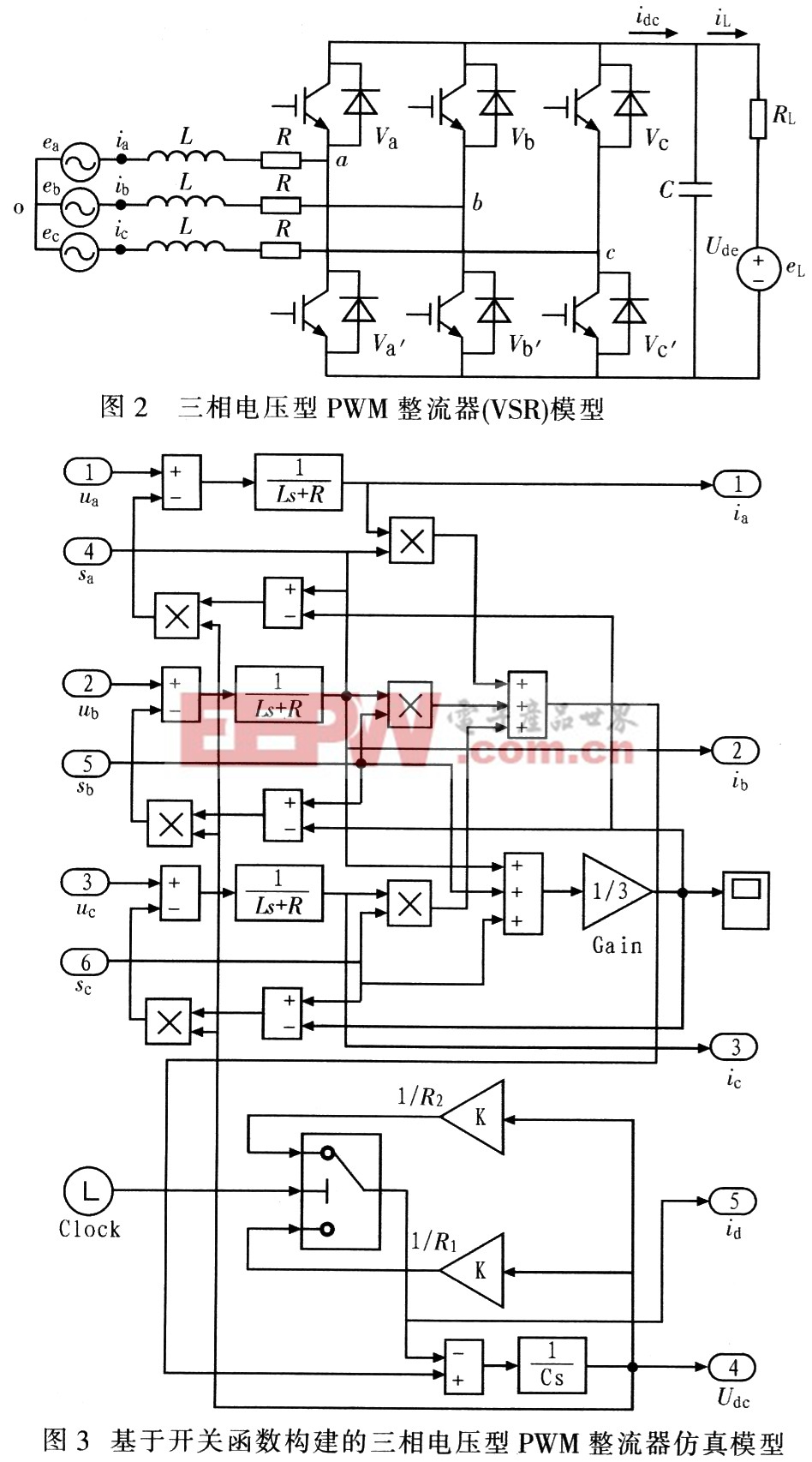
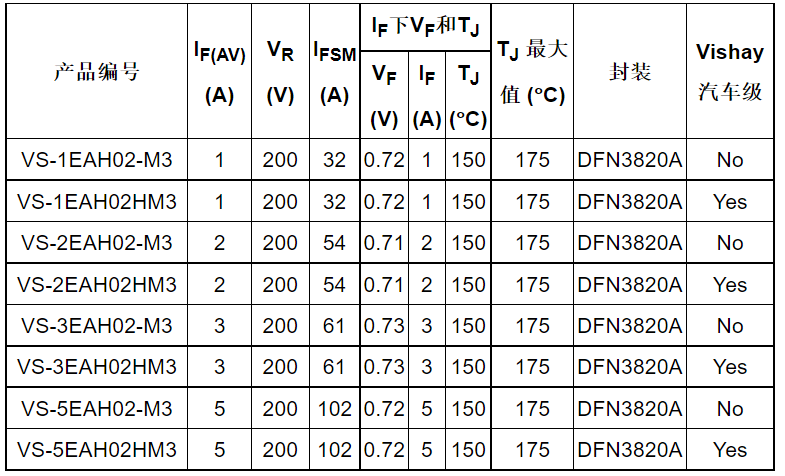
所建的整流器主電路采用阻感負載。三相電壓型PWM整流器主電路如圖2所示。對于Simulink依據整流器的數學模型,采用開關函數微分方程組搭建模型,仿真運算速度較快。由于模塊庫對諸如IGBT的緩沖電路參數,開關延時等參數有細致建模,故而更接近真實情況,如圖3所示。
3.2 控制模塊
仿真時所用的控制模塊是基于空間電壓矢量的電流解耦控制算法,電流解耦控制模塊如圖4所示。





評論