基于雙IGBT的斬波式串級調速系統的研究

目前工業生產中普遍采用的PWM變頻調速屬于精型調速。而對風機、泵類負載采用變頻調速,其逆變器功率為全功率。若采用串級調速方法,則其逆變器功率僅僅為全功率的1/2~l/3。串級調速系統還具有裝置安全、可靠性高的優點。即使串級調速逆變裝置萬一出現故障,異步電動機也能完全脫離串級調速裝置轉換到轉子短接全速運行。但傳統串級調速方法存在一個突出的缺點,就是系統功率因數較低,高速滿載運轉時總功率因數約0.6,低速時總功率因數更差。從節約能源的角度考慮,需要尋找方法提高串級調速系統的功率因數,改善其效率。
2 異步電動機串級調速系統原理
異步電動機串級調速系統是在繞線式異步電動機的轉子回路中串入一個與轉子回路頻率相同的交流附加電勢,如圖1所示。通過改變附加電勢的幅值和相位實現調速。
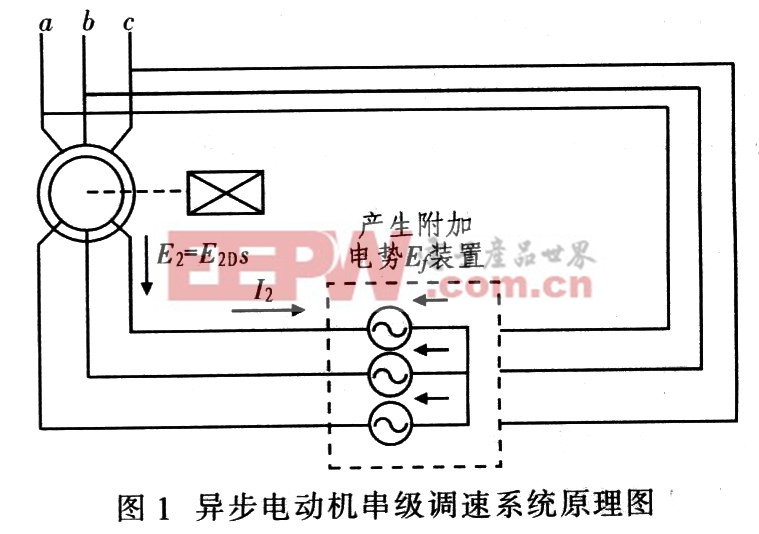
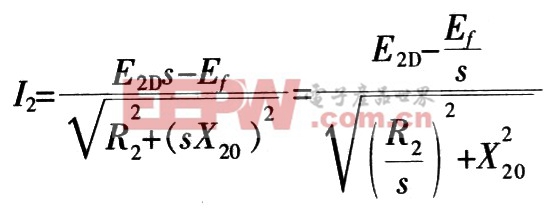
異步電動機串級調速系統如何通過改變Ef相位調節電機轉速。假定電動機拖動恒轉矩負載,轉子每相電流,2為:
電動機產生的轉矩M=CMφI2cosψ2,I2值的減小使電動機轉矩亦相應減小,電動機轉矩值小于負載轉矩值的狀態,穩定運轉條件被破壞,迫使電動機降速。隨著轉速的降低,s的值增大,轉子電流I2回升,轉矩M亦相應回升,直到電動機轉矩與負載轉矩相等時,減速過程結束,電動機就在此轉速下穩定運轉,即串入與E2相位相反的附加電勢Ef幅值愈大,電動機的穩定轉速就愈低。反之亦然。
3 異步電動機串級調速系統功率因數分析
串級調速裝置的容量與調速范圍成正比,當要求的調速范圍不寬時,裝置的容量較小,可降低費用。但傳統的晶閘管串級調速系統存在突出的缺點:功率因數低、無功損耗大。其原因有以下幾方面:
(1)串級調速系統中的逆變變壓器需要由電網吸收無功功率QB,這是造成總功率因數低的主要原因。
串級調速系統總的功率因數為:

串級調速系統從電網吸收的總有功功率為P=P1一PB,而從電網吸收的總無功功率為Q=Q1+QB,使得串級調速系統總功率因數較低。
(2)串級調速系統中轉子整流電路存在嚴重的換流重疊現象,引起電動機轉子電流落后于轉子電壓相位μ/2,使電動機本身運轉的功率因數變差,即cosψD=cosψcos(μ/2)
(3)串級調速系統中電動機和逆變變壓器的電流波形發生畸變,其電流的高次諧波分量引起無功的畸變功率,使串級調速系統的總功率因數亦變壞。提高功率因數的關鍵是如何減少從電網中吸收的無功功率。
4 幾種改進串級調速方案分析
4.1 三相四線雙晶閘管串級調速系統
三相四線雙晶閘管串級調速的核心是在異步電動機轉子回路串入4線式變流器,該電路用輔助的晶閘管為無功功率提供了通路,從而提高了系統的功率因數。其控制方法是通過控制主橋晶閘管和輔助晶閘管輪流導通,使逆變橋直流側電壓在線電壓與相電壓之間跳變,從而達到提高功率因數的目的。
4.2 新型GTO串級調速系統
新型GT0串級調速系統是在逆變器的直流側并聯一個GTO元件,并通過PWM方式控制GT0的導通和關斷,改變直流回路逆變電壓,從而調節電動機轉速。該方案中PWM的控制方式,可按逆變器的逆變角β固定在正角或β角固定在負角兩種不同方式控制,達到不同情況下提高裝置功率因數的目的。
4.3 新型三相四線雙IGBT串級調速方案
對于新型GTO串級調速系統,尤其在β角為負的情況下,通過裝置向電網回饋無功,較大地改善了系統功率因數,但其回饋電流的波形較差,電壓損失較大,晶閘管關斷不可靠,由于采用PWM控制,系統裝置也比較復雜。
為此,需要尋求一種簡單、高效的新型轉差回饋調速裝置,使其能更大程度地提高系統功率因數,從而引入三相四線制雙IGBT串級調速方案,其原理如圖2所示。繞線式異步電動機的轉子輸出電壓,經整流后與三相橋式晶閘管逆變電路相連;VT7,VT8為兩個輔助開關元件IGBT,它為無功功率提供了通路,RCD網絡并聯于IGBT兩端,起限制IGBT峰值電壓的作用。






評論