基于CAN總線的水下機器人執行節點設計與實現

與傳統的纜控水下航行器(ROV)相比,自主水下航行器(AUV)具有如下特點:(1)環境適應性強,活動范圍大,可沖破人工潛水極限進入現場進行接近觀測;(2)體積小,使用方便,便于布放和回收;(3)可根據水聲信號遙控或預置程序控制,按要求進行相關項目觀測;(4)有自主動力,水下運行時間相對較長,有源噪聲低等。
本文引用地址:http://www.j9360.com/article/188669.htm因水下機器人裝配有大量傳感器,要求控制系統具有較高的處理速度,又因開發費用較高,必須具有很好的可擴展性來改變測量裝置以實現多功能。分布式控制系統在適用范圍、可擴展性、控制速度、系統模塊化、可維護性、抗單點故障等方面具有明顯優勢,是極佳的選擇。
圖1所示為本文開發的基于CAN總線的分布式水下機器人控制系統結構。CAN總線具有如下特性:(1)實時性高。多主站工作方式,優先級高的節點優先傳輸數據,數據傳輸率高(1Mbit/s);(2)檢錯和糾錯機制強。發送信息損壞自動重發,采用獨特的非破壞總線仲裁技術,有CRC及其它校驗;(3)連接簡單,可擴展性強,開發方便。通訊協議與開放系統互連模型OSI一致,應用層協議可有用戶自己定義。

圖1 水下機器人控制系統結構
控制系統由各個功能節點通過CAN總線連接構成,各節點大部分時間并行工作,只在必要時與中央控制節點通訊。其中的執行節點直接控制AUV的現場執行機構,對AUV的功能實現性起著至關重要的作用。在研究開發的AUV中,執行節點除完成CAN通信外,還有以下幾個主要功能:(1)航行速度控制功能。其執行部件為一三葉螺旋槳,產生主推力;(2)航行方向控制功能。執行部件是一對垂直舵;(3)航行深度控制功能。實現深度控制與縱傾控制,執行部件是一對水平舵;(4)傳感器模塊的旋轉調平控制功能,實現部分傳感器位姿調整。其中,(1)為速度伺服控制系統,(2),(3),(4)為位置伺服控制系統,均由無刷直流伺服電機進行驅動。
執行節點硬件設計
CAN接口設計
節點主芯片選用Philips公司的P87C591,其兼容80C51指令集,并成功的集成了Philips公司的SJAl000CAN控制器,該嵌入式CAN控制器具有以下特點:(1)完全符合CAN210規范,控制CAN幀的接收和發送;(2)CAN接口包含5個實現CPU與CAN控制器連接的特殊功能寄存器。對重要CAN寄存器的訪問通過快速自動增加的尋址特性和對特殊功能寄存器的位尋址來實現;(3)CAN控制器的發送緩沖區能夠保存一個完整的CAN信息幀(擴展或標準幀),只要通過CPU啟動發送,信息就從發送緩沖區傳輸到CAN內核模塊;(4)當接收一個信息時,CAN內核模塊將串行數據流轉換成并行數據傳輸到驗收濾波器,通過此可編程濾波器,P87C591確認接收需要的信息。
圖2所示為以P87C591為核心的CAN節點接口電路。P1.0,P1.1分別對應CAN的收(RXDC)和發(TXDC)線,通過高速光耦(6N137)與總線實現光電隔離。CAN收發器選用Philips的P82C250,以差分方式發送,CAN總線末端加124的終端匹配電阻。
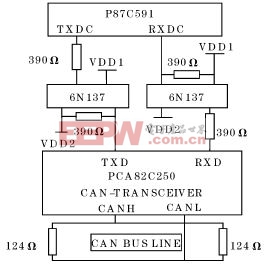
圖2 CAN總線接口電路
無刷直流伺服系統構建
根據應用場合,選擇了瑞士Maxon公司的EC系列無刷直流伺服電機(DCBrushless ServoMotor),其滿足以下要求:(1)電機重量輕,體積小,這在水下潛器設計中是十分關心的問題,而且轉動慣量約可減少50%左右;(2)無機械換向,大大減少了電磁干擾,適合AUV在狹小空間容納多種傳感器的特點;(3)特征曲線基本為直線,控制性好;(4)有一定的防潮和耐高溫能力。螺旋槳驅動和舵驅動功率不同,分別為400W和80W;工作電壓分別為直流48V和直流24V。
電機驅動器采用美國Accelus公司的直流無刷數字伺服驅動器,其有以下特點:(1)全數字驅動器,電流、速度和位置三環控制可以自由配置;(2)驅動器中集成有flash存儲器,其有配套的計算機軟件,通過驅動器上的RS232端口對驅動器進行部分功能設定。(3)由于為全數字驅動器,與控制器連接簡單。
圖3表示了一路直流無刷電機伺服系統。對螺旋槳,驅動器設置成速度控制模式,其它設置為位置控制模式。螺旋槳驅動電機采用PWM調速方式,其它驅動電機都通過微控制器I/O口輸出脈沖控制。
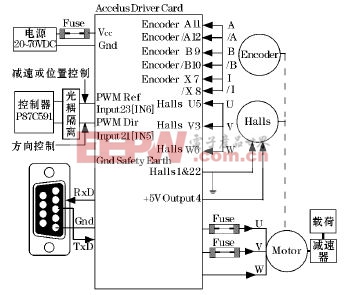
圖3 無刷電機伺服控制系統示意圖
電機驅動器按要求進行合理設置和連接后,與控制器P87C591密切相關的信號線有兩條:一條控制電機的轉速或位置,一條控制電機的轉向。對螺旋槳控制,將其驅動器設置為速度模式,采用PWM調速控制,電機的轉速與PWM的占空比成正比。其它電機控制系統,驅動器設置為位置模式,由于這幾個電機控制系統對電機的轉速要求不高,采用定轉速,這樣脈沖頻率恒定,通過對P87C591的定時器編程產生脈沖,另外用控制器的一個端口控制電機的轉向。
為了保證系統工作安全、可靠,在控制器與驅動器之間,采用高速光耦6N137進行隔離,其原因:(1)控制器和驅動器存在接地電位差;(2)抑制環境干擾信號;(3)控制器供電4.5~5V,為弱電,而驅動器供電20~70V,相對較高。在電源輸入和電機輸出都配置保險絲進行安全保護。
執行節點軟件設計
應用層協議制定
在CAN210規范標準中,為了用戶使用的靈活性,只對物理層和數據鏈路層進行了規定,沒有定義應用層,這就需要用戶根據自己需求制定應用層協議。雖然目前可以使用一些成熟的應用層協議,如HiLon、CANOpen、DeviceNET和SDS協議等,但缺乏針對性,因此首先制定CAN應用層協議。

伺服電機相關文章:伺服電機工作原理








評論