小型仿人機器人的設計及步態規劃

1 引言
機器人是一門綜合性很強的學科,有著極其廣泛的研究和應用領域。機器人技術是綜合計算機技術、信息融合技術、機構學、傳感技術、仿生科學以及人工智能等多學科而形成的高新技術,它不僅涉及到線性、非線性、基于多種傳感器信息控制以及實時控制技術,而且還包括復雜機電系統的建模、數字仿真技術及混合系統的控制研究等方面的技術。
仿人形機器人是機器人技術中的一個重要研究課題,而雙足機器人是仿人形機器人研究的前奏。步行技術是人與大多數動物所具有的移動方式,是一種高度自動化的運動,雙足步行系統具有非常復雜的動力學特性,具有很強的環境適應性。相對輪式、履帶式機器人,它具有無可比擬的優越性,可進入狹窄的作業空間,也可跨越障礙、上下臺階、斜坡及在不平整的地面上工作,以及護理老人、康復醫學和一般家庭的家政服務。另一方面,由于雙足機器人具有多關節、多驅動器和多傳感器的特點,而且一般都具有冗余的自由度,這些特點對其控制問題帶來很大難度,為各種控制和優化方法提供理想的實驗平臺,使其成為一個令人矚目的研究方向,因此對雙足步行機器人行走規劃機器控制的研究不僅具有很高的學術價值,而且具有一定的現實意義。
以小型雙足機器人的設計為重點,介紹一款小型雙足機器人的設計,包括自由度配置,動力源核材料選擇,并針對所設計的機器人進行靜態步行規劃。
2 小型雙足機器人本體設計
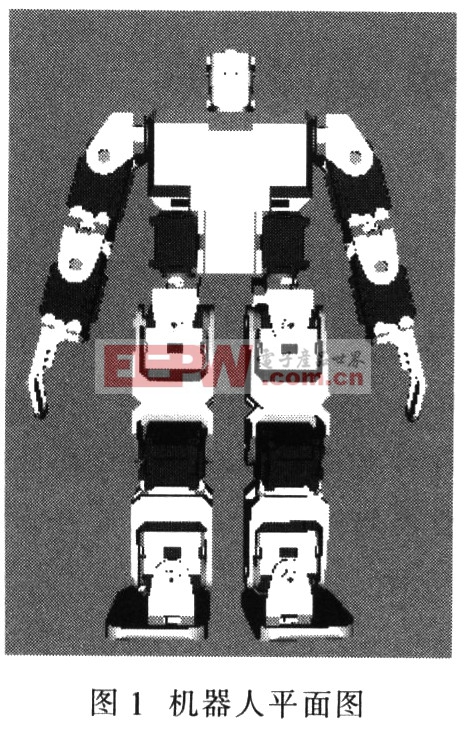
作為一種雙足機器人研究平臺,要求所設計的機器人能夠滿足研究者對雙足機器人的基本要求,即機器人具備穩定行走的能力,為研究雙足機器人的行走方法步態規劃提供平臺。圖1為所設計的雙足機器人的平面圖。機器人共有18個自由度,頭部的前方和左右兩側都裝有超聲波傳感器,用來檢測障礙物,頭頂裝有聲敏傳感器,用來檢測聲音。
2.1 機器人自由度配置
鄭元芳博士從仿生學的角度研究仿人機器人腿部自由度配置。得出關節扭矩最小條件下的兩足步行結構自由度配置方案。他認為髖部和踝部各設置2個自由度,可改變行走方向,踝關節處再增加一個回轉自由度,使得腳板在不規則的表面落地;膝關節設置 1個自由度,方便上下臺階。則每條腿要設置7個自由度。


評論