LMS自適應濾波器的仿真與實現

0 引言
自適應濾波器可廣泛應用于系統識別、信號處理和數字通信等許多領域。而超大規模集成電路和FPGA的飛速發展,也促進了自適應濾波技術的進步。此外,由于其對干擾頻率不敏感,且其權值調整是基于對系統參數的優化,因此,自適應濾波器仍然越來越多地受到人們的關注。
1 LMS自適應濾波器
1.1 LMS算法
最小均方誤差(LMS)算法具有計算量小、易于實現等優點,因此,在實踐中被廣泛應用。LMS算法的基本思想是調整濾波器自身的參數,使濾波器的輸出信號與期望輸出信號之間的均方誤差最小,并使系統輸出為有用信號的最佳估計。實質上,LMS可以看成是一種隨機梯度或者隨機逼近算法,可以寫成如下的基本迭代方程:
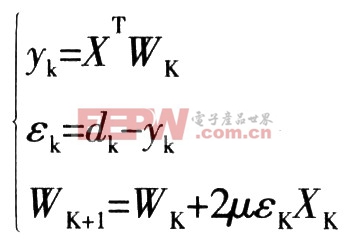
其中,μ為步長因子,是控制穩定性和收斂速度的參量。從上式可以看出,該算法結構簡單、計算量小且穩定性好,但固定步長的LMS算法在收斂速度、跟蹤速率及權失調噪聲之間的要求相互制約。為了克服這一缺點,人們提出了各種變步長的LMS改進算法,主要是采用減小均方誤差或者以某種規則基于時變步長因子來跟蹤信號的時變,其中有歸一化LMS算法(NLMS)、梯度自適應步長算法、自動增益控制自適應算法、符號一誤差LMS算法、符號一數據LMS算法、數據復用LMS算法等。
1.2 LMS自適應濾波器的結構原理
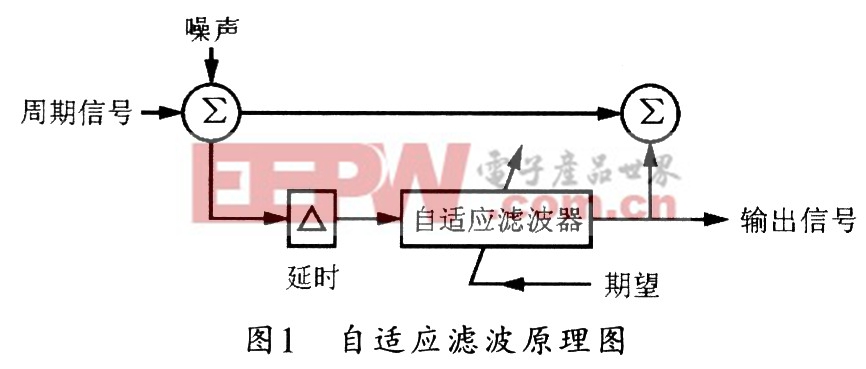
自適應濾波是在部分信號特征未知的條件下,根據某種最佳準則,從已知的部分信號特征所決定的初始條件出發,按某種自適應算法進行遞推,在完成一定次數的遞推之后,以統計逼近的方式收斂于最佳解。當輸入信號的統計特性未知,或者輸入信號的統計特性變化時。自適應濾波器能夠自動地迭代調節自身的濾波器參數.以滿足某種準則的要求,從而實現最優濾波。因此,自適應濾波器具有自我調節和跟蹤能力。在非平穩環境中,自適應濾波在一定程度上也可以跟蹤信號的變化。圖1為自適應濾波的原理框圖。
2 LMS濾波器的仿真與實現
2.1 LMS算法參數分析
傳統的LMS算法是最先由統計分析法導出的一種實用算法.它是自適應濾波器的基礎。通過Matlab仿真對LMS算法中各參數的研究,總結出其對算法的影響。現針對時域LMS算法的各參數進行一些討論。
(1)步長
步長μ是表征迭代快慢的物理量。由LMS算法可知:該量越大,自適應時間μ越小,自適應過程越快,但它引起的失調也越大,當其大于1/λmax時,系統發散;而該值越小,系統越穩定,失調越小,但自適應過程也相應加長。因此,對步長μ的選擇應從整個系統要求出發,在滿足精度要求的前提下,盡量減少自適應時間。
(2)級數
自適應濾波器的級數應與噪聲通道的傳遞函數F(z)的階數一致。事實上,只有在二者相等時,自適應濾波器傳遞函數才有可能等于F(z),以實現噪聲抵消。而當其級數小于F (z)的階數時,參考通道的噪聲將無法與輸入通道的噪聲抵消,故會引起最小均方差增大;當其級數大于F(z)的階數時,過多的級數則會引起失調的增大。因此,只有當濾波器的級數等于F(z)的階數時,自適應濾波器的性能才能達到最佳。










評論