基于TMS320DM270的長途客運車無線視頻監控系統的設

引言
本文引用地址:http://www.j9360.com/article/186152.htm隨著公路交通的不斷發展,長途客運車也隨之不斷增長,方便人們出行的同時,交通事故不斷發生,盜竊、搶劫也時有發生。
為了能使汽車安全的行駛,乘客放心的乘坐,開發研究一套良好的長途客運車無線視頻監控系統就顯得尤其的重要。
近年來傳統的模擬視頻監控技術正在逐步向數字化、網絡化、智能化發展,將監控技術與網絡技術,特別是無線網絡技術完美結合,是數字監控領域的新方向。本文介紹的長途客運車無線視頻監控系統是整合嵌入式技術、CDMA無線網絡通訊技術、MPEG-4數字視頻壓縮技術和GPS定位技術為一體的視頻終端。
系統簡介
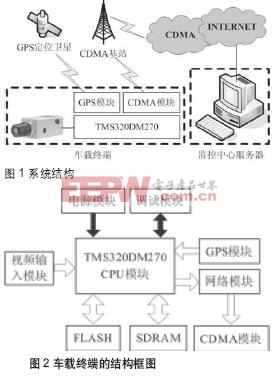
整個無線視頻監控系統由車載終端(包括TMS320DM270 CPU模塊、視頻輸入模塊、CDMA模塊、GPS模塊等)、通信網絡和監控中心組成,其系統結構如圖1所示。
車載終端被放置在長途客車內,用來采集車內圖像并利用MPEG-4技術對圖像進行壓縮,使圖像分辨率達到CIF格式,幀率在1-8幀/秒可調。同時GPS模塊實時接收全球定位衛星發射的信號,得到當前車輛位置和速度。最后CPU將壓縮后的視頻流與GPS數據通過CDMA無線通信網絡和Internet網絡發送到監控中心,從而在監控中心可以看到車內情形,以及在電子地圖上顯示客車的方位與速度。
車載終端硬件設計
車載終端的設計是根據系統的總體要求,將硬件電路劃分為獨立的硬件功能模塊(TMS320DM270 CPU模塊、視頻輸入模塊、CDMA模塊、GPS模塊等),并給出各個硬件模塊的功能定義以及他們之間的關系。車載終端的結構框圖如圖2所示。
TMS320DM270是TI公司推出的一款雙核多媒體處理器。它內部集成了兩個處理器:ARM7TDMI RISC處理器;TMS320C5409 DSP,并帶有兩個協處理器——圖像加速器(iMX)和可變步長編解碼器(VLCD)。
DM270還集成了SDRAM控制器、CCD可編程控制器、預覽引擎(Preview engine)、專用的硬件3A模塊可以消除主處理器的某些任務負擔,如:白平衡、自動曝光和自動調焦。除此之外,還有USB、UART、SPI、外圍存儲接口等功能。
視頻輸入模塊
視頻輸入模塊主要由鏡頭模塊和模擬前端電路組成。模擬前端的作用是將圖像傳感器輸出的模擬信號鉗位放大,并完成A/D轉換,這里采用的是TVP5150。TVP5150是TI的一款高質量數字視頻解碼器,可以很方便將模擬視頻信號轉換成數字視頻信號。TVP5150由一組內部寄存器初始化并控制,因此在系統復位上電時DM270要通過I2C對TVP5150進行初始化。
CDMA模塊和網絡模塊
作為監控調度系統,首先要考慮監控覆蓋范圍、實時性、車輛容量、刷新速率等要求,選擇合適的無線數據鏈路。由于長途客車的行駛范圍比較大,所以本系統選擇無線網絡覆蓋范圍較大的CDMA網絡。
CDMA是碼分多址的英文縮寫(Code Division Multiple Access),它是在數字技術的分支——擴頻通信技術上發展起來的一種移動通信技術。本系統采用Q2358C RJ45接口模塊作為CDMA接入設備,它內嵌TCP/IP協議棧,支持高達153.6Kb/s的數據吞吐率,適合窄帶寬視頻傳輸,有相當高的穩定性。由于系統采用了先進的MPEG-4編碼技術,所以完全可以適應CDMA的傳輸速率。
網絡模塊也是本系統中一個重要的組成環節,采用的是AX88796網卡芯片。它負責將CPU處理后的數據(MPEG-4視頻數據、GPS數據)通過RJ45接口發送給CDMA模塊,CDMA模塊再根據目的地址把數據送給監控中心。
GPS模塊
GPS(Global Positioning System)是一套由美國國防部歷時20年,耗資200億美元,于1994年建成的衛星定位系統,其基本原理是利用繞著地球的24顆衛星所發射的信號,再加以幾何上的計算,來得到接收者的位置。本系統采用的是Motorola UART接口的一款GPS模塊,定位誤差小于25米,測量速度范圍是515米/秒。該模塊將接收的衛星數據轉換為規定的數據格式,其中包括經度、維度、高度、速度等。CPU從串口讀取這些數據,確定車輛的位置與速度。
FLASH和SDRAM模塊
本系統設計2M的NORFLASH用來存儲程序,NORFLASH的2M空間被劃分為四部分,分別存放Bootloader、參數、內核和文件系統。16M的SDRAM用于系統軟件的運行以及各種數據(MPEG-4視頻數據、GPS數據)的存取。
車載終端軟件設計
基于DM270的軟件設計分為兩部分:ARM端設計、DSP端設計。DSP端的軟件設計主要是圖像算法的設計,本系統采用的是MPEG-4算法,同時把DSP作為嵌入式uClinux的外部設備,并編寫DSP的驅動程序,注冊進內核;ARM端運行uClinux操作系統,處理非成像功能,用來控制整個系統的各個模塊。系統軟件層次結構如圖3所示。
uClinux內核移植
uClinux是Linux的一個分支,源代碼開放,并且被廣泛的移植到多種CPU平臺上。uClinux內核是由Linux內核根據所要運行的CPU裁減、修改而來的,因此它保持了原有Linux操作系統的主要優點,如穩定性好,出色的文件系統支持功能,完善的應用程序和驅動程序開發環境,以及Linux原有的完整的TCP/IP協議包。這樣,當越來越多的嵌入式系統需要提供網絡支持功能時,uClinux便成了首選的操作系統。
uClinux的移植工作主要包括內核的修改、裁減與編譯。
首先是開發環境的建立。主要由目標系統硬件開發板和宿主PC機構成。先在宿主PC機上安裝標準Linux發行版Red-Hat Linux和交叉編譯工具arm-elf-tools-20030314.sh,再從網絡上獲得免費的uClinux內核源代碼uClinux-dist-20041215.tar.gz,并在宿主PC機上執行tar zxvf uClinux-dist-20041215.tar.gz對其解壓。
其次是內核的修改。修改的文件主要有:
1)uClinux-dist/linux-2.4.x/arch/armnommu/boot/compressed/head.S,啟動文件。
2)uClinux-dist/linux-2.4.x/arch/armnommu/boot/Makefile,啟動配置文件,主要修改的是ZTEXTADDR(自解壓代碼的起始地址)和ZRELADDR(內核解壓后代碼輸出起始地址)。
3)uClinux-dist/linux-2.4.x/arch/armnommu/config.in,修改DRAM_BASE、DRAM_SIZE、FLASH_MEM_BASE和FLASH_SIZE,主要為確定SDRAM、FLASH的起始地址和大小。
4)uClinux-dist/linux-2.4.x/arch/armnommu/Makefile,修改TEXTADDR來配置內核的起始地址。
5)uClinux-dist/linux-2.4.x/drivers,修改并添加所需的驅動程序。
6)uClinux-dist/linux-2.4.x/drivers/block/blkmem.c,ROM文件系統的定位修改。
7)uClinux-dist/vendors/TI/dm270,修改硬件配置文件。
8)uClinux-dist/linux-2.4.x/Makefile,選擇CPU體系機構(ARCH?:=?armnommu)和交叉編譯器(CROSS_COMPILE?=?arm-elf-)。
對內核修改完畢后,在uClinux-dist目錄下執行make menuconfig。在彈出的對話框中對內核進行配置和裁減。
最后就是編譯內核。依次執行make dep(編譯相關依賴文件),make clean(在編譯內核之前把內核清理干凈),make(最終的編譯命令),此時在images目錄下生成了image.ram和image.rom文件,iamge.rom便是要燒寫到FLASH中的內核映像文件。


評論