PWM整流器中相序調整的新方法

1 引言
本文引用地址:http://www.j9360.com/article/185914.htmPWM整流器不僅可以控制AC/DC 變換性能,而且可實現網側單位功率因數和正弦波電流控制,甚至能使電能雙向傳輸[1],因此被廣泛應用于功率因數補償、高性能整流器、電能回饋、有源濾波等領域。整流器的輸入端來自電網的三相電源,其相序a,b,c 在保證相位差120°的前提下只是一個相對量,而整流器算法中三相電源的相序涉及大量的數學變換以及PWM 波的輸出,需在輸入端定義。這樣如果輸入端接線錯誤,就不能實現算法功能。因此在不同的電網環境,必須先用儀器測量相序,再讓整流器工作,這樣的過程繁瑣且容易出錯。在此提出一種新的三相電源相序調整方法,有效地解決了上述問題。
2 PWM 整流器的數學模型及控制策略
2.1 PWM 整流器的基本結構
圖1 示出三相VSR 主電路結構。可見,該電路由交流側三相電感、三相全控橋、直流側濾波電容組成。當VSR 正常工作時,通過PWM 波控制開關管的關斷順序,實現能量的雙向傳輸。
圖1 三相橋式電壓型PWM 整流器
橋臂上下兩個功率開關管的導通是互補的,即上橋臂開關管導通時,對應的下橋臂功率開關管關斷,其相應的邏輯開關函數為:

2.2 數學模型及控制策略
設定電網電壓為:

式中:uao,ubo,uco分別為交流側a,b,c 與電源中點o 間的電壓;Up為峰值電壓。
由式(1)可得出三相靜止坐標系下的開關函數數學模型為:

2 式中:ia,ib,ic為交流側電流;Udc為直流側的負載電壓。
為判別相序,將三相電壓轉換成線電壓。根據Clarke 變換,將a,b,c 坐標系轉換為α,β 坐標系:
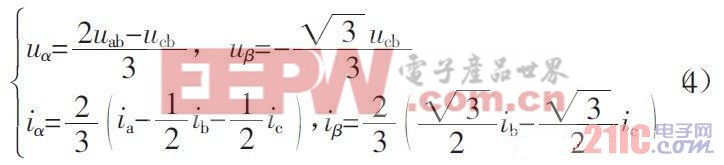
式中:uab,ucb分別為線電壓,且以b 相為參考點;uα,uβ,iα,iβ分別為α,β 坐標系中的電壓和電流。
根據Park 變換,將α,β 坐標系轉換為兩相旋轉d,q 坐標系:

式中:ud,uq,id,iq分別為d,q 坐標系中的電壓和電流;θ=2πft,f 為電網頻率,0≤t≤Tuα,Tuα為uα的周期。
經過以上變換后,在d,q 坐標系中的三相電壓型PWM 整流器的數學模型為:
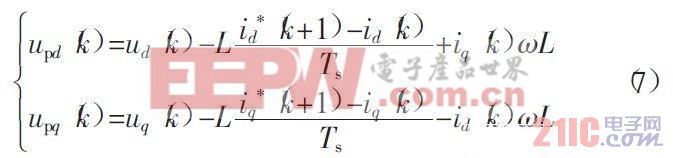
令交流側電壓矢量在d,q 軸上的分量分別為upd=UdcSq,upq=UdcSd.在式(6)中,d,q 軸變量互相耦合,因而不能對其電流進行單獨控制。通過id,iq的前饋解耦控制,對ud,uq進行前饋補償,并且采用電流預測法對電流環進行控制,方程如下:
式中:id* 為電壓環PI 的輸出值;iq*=0.
將第k+1 次
采樣周期時輸入電流的采樣值,用給定值id*(k+1),iq*(k+1)來代替,計算出符合電流變化的輸出電壓矢量。在PWM 中運用空間矢量法合成輸出電壓矢量,使下一次采樣時刻的實際電流以最佳特性跟隨下一時刻的參考電流。
控制系統的電壓外環采用PI 調節器,其輸出得到三相參考電流幅值基準i*,i* 就是d,q 旋轉坐標系下的電流給定值id*(k+1),iq*(k+1)。只要在開關周期內實現式(7),即可實現電流無差拍控制。

pwm相關文章:pwm原理









評論