基于ADS的接收機碼元同步算法實現(xiàn)

假設(shè)接收信號為:
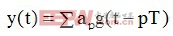 ,式中
,式中 為傳輸?shù)膹?fù)數(shù)數(shù)據(jù),
為傳輸?shù)膹?fù)數(shù)數(shù)據(jù), 為基帶成型濾波波形,對
為基帶成型濾波波形,對 的采樣值可能產(chǎn)生定時誤差,Gardner算法提取的定時誤差為:
的采樣值可能產(chǎn)生定時誤差,Gardner算法提取的定時誤差為: (2-1)
(2-1)其中索引r表示符號數(shù)目,同相I和正交Q方向的第r個符號的判決值分別表示為
 和
和 。同樣,將r和(r-1)兩個判決點中心位置的采樣值表示為
。同樣,將r和(r-1)兩個判決點中心位置的采樣值表示為 和
和 。整個誤差是I和Q兩個方向的定時誤差之和,且此誤差與載波相位無關(guān)。
。整個誤差是I和Q兩個方向的定時誤差之和,且此誤差與載波相位無關(guān)。式中
 ,
, 表示同相和正交分量,T為符號周期。Gardner算法適用于跟蹤和捕獲模式。本文引用地址:http://www.j9360.com/article/185592.htm
表示同相和正交分量,T為符號周期。Gardner算法適用于跟蹤和捕獲模式。本文引用地址:http://www.j9360.com/article/185592.htm
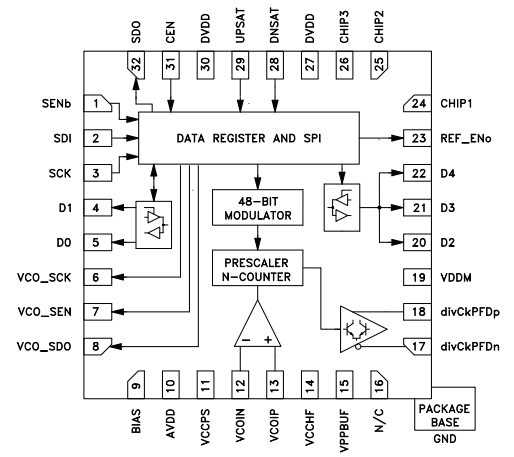
圖3 16QAM解調(diào)后波形
在 16QAM調(diào)制信號中,例如果符號從-1變?yōu)?,1變?yōu)椋?,-3變?yōu)?,3變?yōu)椋?等的時候,則沒有定時誤差時,中間點的平均值應(yīng)為零。而有定時誤差時,將會產(chǎn)生一個非零的值,它的大小與差錯的大小成正比。另外一些情況,當(dāng)沒有定時誤差時,中間點的平均值并不是零。例如符號從3變?yōu)椋?,當(dāng)沒有定時誤差時,中間點的平均值是1,如圖3所示。
如果直接把Gardner算法運用在16QAM解調(diào)系統(tǒng)中,定時誤差檢測的結(jié)果有些點上是正確的,有些點上是錯誤的。對于大量數(shù)據(jù),這些錯誤的平均值是零,因為沒有定時誤差的情況,中間點可能是0,-1,1,-2,2,其平均值為零。因此這些錯誤會導(dǎo)致定時時鐘的抖動,通過濾波器可以減小這些抖動。
為了消除這些抖動。我們對Gardner算法做了進(jìn)一步改進(jìn),其改進(jìn)后算法為: (2-2)
(2-2)
其中
當(dāng)定時超前,誤差為負(fù),定時滯后,誤差為正。Gardner算法具有兩個特點:一是每個符號只需要兩個采樣點,且以碼元速率輸出誤差信號;二是估計算法是獨立于載波相位的,不受載波相位偏移的影響,即可以在載波相位同步之前,進(jìn)行定時誤差估計。



評論