基于Matlab的高功率因數校正技術的仿真

對(1)進行離散化處理得到:
![]() (2)
(2)
式中: 為比例系數; 為積分系數;
T為采樣周期; 為積分時間常數。
PI系數的確定通常通過實驗確定,或通過湊試,或者通過經驗公司來確定。
陷波濾波器的設計可根據公式(3)確定
![]() (3)
(3)
式中: 是濾波頻率的角速度;Q值按不同的要求確定。離散化可以由Matlab的sysd=c2d(sys,Ts)方程方便的實現。
5.3 DSP控制的實現[3]
這里采用TI公司的16位TMS320LF2407來實施控制方案。對電流回路和電壓回路分別采用20kHz和10kHz的控制頻率。兩個中斷程序INT2和INT3用來完成PFC的數字控制,其中斷程序 INT2負責3個輸入的采樣以及電流回路的PI控制,中斷程序INT3負責電壓回路的PI控制以及陷波濾波。圖10是主程序控制流程圖,其中INT2的中斷優先級高于INT3,所以當INT3沒有完成而INT2中斷發生時,INT3將懸掛,直到INT2中斷程序運行結束后才能繼續運行。
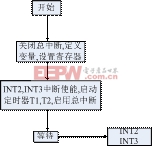
圖7 主程序流程圖
5.4 仿真結果及分析
根據圖6和TMS320LF2407的特性在Matlab的Simulink中進行仿真得到仿真圖如圖8所示,由圖可知,DSP數字控制PFC使輸入電流很好地跟隨輸入電壓,而且完全消除了高次諧波電流,實現了功率因數校正的目的。從這里可以看出單相Boost PFC電路的數字控制的優點是元器件少,便于系統調試和維護;另外DSP內部的數字處理不會受到電路噪聲的影響,避免模擬信號傳遞的畸變p失真,因此控制可靠;還有因為軟件中包含復雜的控制系統因而顯著的減少了電路的尺寸。缺點是在整流器件方面采用數字控制研究開展的還不多,成熟的控制算法難以獲得,此外數字控制芯片如DSP的價格相對較高等等。
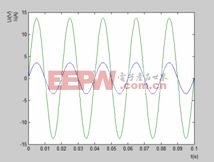
圖8 Boost PFC數字控制器輸入電壓電流仿真圖
6.結論
從上面的分析可以知道,模擬控制器和數字控制器在單相Boost功率因數校正電路中都可以提高功率因數,消除高次諧波電流和降低總諧波畸變因數(THD),完全的實現了功率因數校正的目的,但是數字控制器在相比于模擬控制器,在功率因數校正的效果上更優,且能減少元器件數量和顯著的降低電路的體積;便于電路的維護和升級,且不易受環境的影響。雖然用于數字控制電路中的DSP價格還比較高,但是隨著時代的進步,DSP價格的進一步降低和控制算法的成熟,相信在不遠的將來,數字控制器一定會取代模擬控制器廣泛的應用于PFC電路中。







評論