電動汽車車載智能快速充電器的研究與設計

由以上計算分析, 功率管Q1 和Q2 選擇型號為FCH47N60的MOS管, 可承受600V 的電壓和47A的電流, 整流二極管選擇型號為MRB40250的肖特基管,其正向平均電流為40A, 反向耐壓最大為250V.
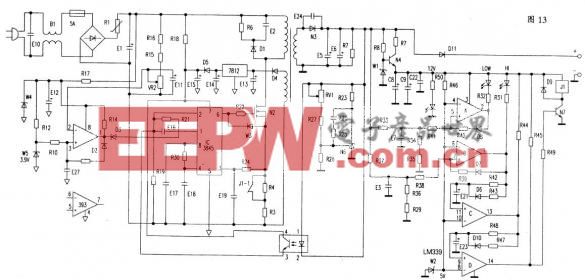
2.2.4 吸收回路及濾波回路的設計
為解決關斷時器件的過壓問題, 在圖3 中由D1, R1, C4 組成RCD 緩沖器, 通過減緩Q1 漏源極電壓的上升速度使下降的電流波形同上升的電壓波形之間的重疊盡量小, 以達到減小開關管損耗的目的。
同理由D4, R4, C8 對Q2 的關斷過程進行保護。
在輸出整流二極管之后采用LC 濾波電路減小輸出電流電壓紋波。濾波電感L1 的作用是使負載電流的波動減小,濾波電容C5 的作用是使輸出電壓的紋波減小。當負載突減時, 濾波電容儲能; 負載突增時,電容C5 上的儲能首先向負載補充能量,以減小輸出電壓的峰- 峰值。
2.3 控制保護電路
控制保護電路主要完成3個功能:①控制充電系統按照當前的設定的輸出電壓電流值產生占空比可變的PWM波, 對開關管進行驅動, 實現功率變換;②當出現過壓、欠壓、過流、過溫等故障時, 控制充電電源的主回路停止工作, 從而將電源的損壞程度控制在最小范圍; ③ 在充放電過程中,對相應的電壓、電流、溫度等參數實時顯示。
2.3.1 驅動信號的產生
驅動信號的產生過程如下: 將電阻分壓獲取的輸出電壓信號以及電流霍爾傳感器采集的輸出電流信號送至SG3525的誤差放大器的反相輸入端, 由其產生兩路PWM 方波信號, 6N137對該方波信號光耦隔離, 并送至FAN7390 進行功率放大和波形轉換, 以驅動半橋變換器。該部分的設計中主要涉及到以下關鍵技術:
①振蕩頻率及死區時間的設置。
參考SG3525 的有關設計資料, SG3525振蕩電路的輸出是頻率減半的互補方波信號, 該充電器的設計中, 后級電路的變換頻率設計為50kH z, 故SG3525 正當電路的工作頻率設置為100kH z.如下式:

死區時間的設定為:
當設定電路振蕩頻率為50kH z, 死區時間為3??3??s時, 該部分元件參數的取值為:
②反饋補償網絡的設計。
為滿足系統穩定性和靜態誤差的要求, 該部分設計采用無靜差的PI調節器作為補償網絡。由于充電器的負載是鉛酸蓄電池, 蓄電池的電壓和內阻在充電過程中會發生變化, 這樣我們反饋控制中PI調節器難度增大, 由理論推導的RC 參數值參考價值不大。對于這個PI調節器, 我們更注重從實驗的角度出發, 反復嘗試得到一個比較適合的網絡。
經過反復的實驗驗證, 我們采用含有Ⅱ 型誤差放大器的正激變換器反饋補償網絡。為防止電壓和電流環同時起作用時的系統振蕩, 我們在補償網絡的設計中, 通過提高比例積分環節中積分環節的作用, 同時加大時間常數, 使得補償網絡在整個系統中占主導地位, 從而使閉環系統更像一個一階慣性環節, 使系統能夠很好地穩定下來, 抵抗各種擾動引起的電壓和電流波動。
③半橋驅動自舉電路的設計。






評論