基于空間電壓矢量電力機車四象限整流的研究

(2)對于每個扇區的PWM通道有一個固定的切換順序:
(3)每個PWM周期都是以U000開始,以 U000結束。
(4)每個PWM周期內,U000 與 U111維持的時間一樣長。
4.3 實現步驟
將PWM輸出方式開啟至方式000或者111。它們與第二類輸出方式之問只有1位的差別;
(4)在減計數期間,當CMPR2和通用定時器1發生第二次匹配時,將PWM輸出置回到第二類輸出方式;
(5)在減計數期間,當CMPR1和通用定時器1發生第二次匹配時,將PWM輸出置回到第一類輸出方式。根據以上原理,我們就可以程序中實現SVPWM波形的實時生成。
5.仿真結果分析
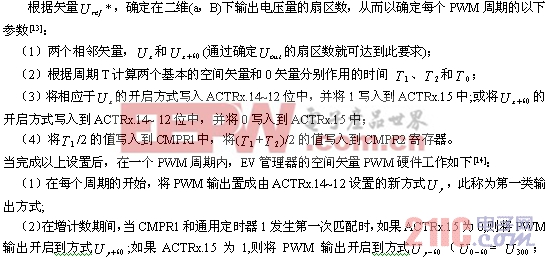
在實驗室就本控制系統進行全數字實現,圖5.1為IGBT SVPWM整流的實驗波形。觀察可知,本系統利用PWM控制技術使輸入側電流波形接近為正弦,與輸入側電壓基本同相。由于程序計算有一定的延遲,使輸入側電壓與輸入側電流波形的相位發生少許偏移[15]。
圖5.2為系統運行于整流狀態時相應的PWM輸出波形。由于本控制系統采用了二相調制方法,由圖5.2可以看出在一個工作周期內,相應的IGBT在一段60 區間內保持關斷狀態,在另一段60 區間內保持開通狀態,即有120 區間IGBT不發生動作,采用這種調制方法,使開關損耗大大降低。
圖5.3是當控制系統運行于能量回饋狀態時實驗波形。控制系統的仿真結果與實驗結果基本一致,能使三相整流器具有高功率因數和實現能量回饋,滿足工業領域對整流電源的要求。
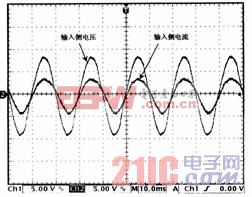
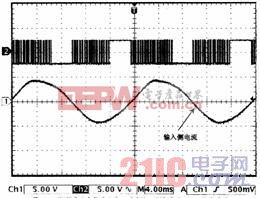
圖5.1 SVPWM整流波形圖 圖5.2 整流狀態下PWM輸出波形圖
圖5.3能量回饋狀態下的實驗波形
6 總結
針對三相PWM整流器空間矢量控制在實現中存在的空間矢量定向、矢量作用時間計算、矢量位置判斷等困難, 本文采用直接計算合成參考電壓矢量的方法,大大簡化了計算過程,便于數字實現,實驗結果驗證了控制算法的科學性。
參考文獻
[1]王兆安、黃俊。電力電子技術(第4 版)[M].北京:機械工業出版社,2000.
[2]丁道宏. 電力電子技術. 北京:航空工業出版社,1992:10
[3]呂德忠, 楊朋, 杜太行著. 計算機控制技術. 天津:河北工業大學,1999:6
[4]呂麗紅、劉志強.電壓空間矢量三相整流器系統的仿真研究[J].計算機仿真,2003,19(3):36-39.
[5]董小鵬等.一種電壓型PWM整流器控制方法的研究[J].電工技術學報,1998,13(5):31-38.
[6]涂從歡. 電力拖動系統中能量回饋控制的設計. 北京:電氣傳動, 1996:43-46
[7]吳隆安, 賴壽宏, 涂從歡. 能量回饋系統的設計與實現. 北京:電力電子技術,1995: 23-24
[8]浦志勇等.三相PWM整流器空間矢量控制簡化算法的研究.電工電能新技術.2002,21(2):56-61.
[9]清源科技. TMS320LF240X DSP應用程序設計教程. 北京:機械工業出版社, 2003:7
[10]劉和平, 王維俊, 江渝, 鄧力等編著. TMS320LF240X DSP C語言開發應用. 北京:北京航空航天大學出版社,2003
[11][美] Texas Instruments Incorporated 著. TMS320LF24系列DSP的CPU與外設. 北京:清華大學出版社,2004:6
[12]張雄偉, 陳亮, 徐光輝. DSP 集成開發與應用實例. 北京:電子工業出版社,2002:10
[13]張雄偉、曹鐵勇.DSP芯片的原理與開發應用(第2 版)[M].北京:電子工業出版社,1996.
[14]江思敏等. TMS320LF240X小DSP硬件開發教程. 北京:機械工業出版社,2003
[15]韓利竹等. MATLAB 電子仿真與應用——工程師工具軟件應用系列. 北京:國防工業出版社,2001:5
更多好文:21ic電源

評論