基于Atmega16單片機的重物提升控制系統設計

隨著微電子技術的發展,電氣控制方式變得更加靈活多樣,控制精度越來越高。智能化控制中越來越多地采用了以單片機為核心的控制單元實現設備的智能化控制。介紹以Atmega16單片機為控制核心,實現重物提升位移量的精確控制。
1 重物提升控制系統原理
重物提升控制系統的設計目的是使用智能化的控制技術,將重物提升到預定高度。如圖1所示是系統控制結構圖,從控制結構圖可以看出,控制系統研究對象是重物的提升和降落。主要的控制對象是卷揚機,通過卷揚機的正、反轉運動實現控制目標。
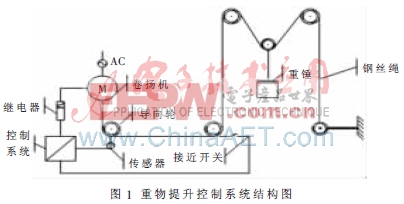
圖中傳感器選用光電編碼器,光電編碼器的轉軸上安裝一個輪,將其固定在導向輪上,這樣光電編碼器和導向輪同軸旋轉,實現光電編碼器轉過的角度與導向輪轉過的角度相等,重物提升的距離就是導向輪周長和轉過總角度的乘積。設導向輪的直徑為d,與其同軸連接的光電編碼器每圈輸出脈沖數設為k,那么脈沖當量為: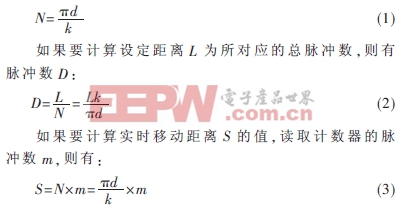
2 單片機主從結構的控制方式
工程設計研究對象是控制卷揚機的轉動,提升重物到預定高度,需要在運行前計算出運行的總脈沖數;設計要求顯示屏能實時顯示重物的高度,需要在運行中對采集的數據實時處理,計算出移動的距離;還要求對重物高度和導向輪周長進行設定,設定參數要能夠存儲和讀出,這就需要帶有存儲功能的智能化器件。Atmega16單片機能夠完成數據處理,內含EEPROM存儲區,在掉電的情況下也能夠保存數據,內含2個外輸入計數器,能夠實現計數任務,可以簡化硬件電路。綜合考慮,本設計選擇Atmega16單片機作為核心器件實現任務要求。為了簡化結構,突出模塊設計,采用雙芯片結構,以主、從機模式的設計方法實現控制要求。主機單元負責傳感器信號的處理、人機界面參數設定、實時數據處理等工作。從機單元負責接收主機所發信號,響應主機決定是否輸出實時的控制指令。
3 光電編碼器測量位移
光電編碼器是一種通過光電轉換將輸出軸上的機械幾何位移量轉換成脈沖或數字量的傳感器,這是目前高精度控制系統最常用的位移量測量傳感器。光電編碼器由光柵盤和光電檢測裝置組成,光柵盤是在一定直徑的圓板上等分地開通若干個長方形孔。原理示意如圖2所示。通過計算光電編碼器輸出脈沖的個數就能知道當前拖動的位移量,還可以通過計算每秒光電編碼器輸出脈沖的個數實現速度測量。
用光電編碼器測量位移時,不僅要知道位移的大小,還要知道位移的正負方向,判別方向是成功測量關鍵。現在市場上見到的光電編碼器是4線接口或5線接口。4線接口的光電編碼器能輸出A、B兩路脈沖,5線接口的能輸出A、B、Z三路脈沖。光電編碼器輸出的A、B兩路脈沖在相位上差90°,正轉時A路超前B路90°,反轉時B路超前A路90°。測量中依據A、B之間的相位差,就能夠判別位移的方向符號,通過帶符號的加運算,可以知道輸出脈沖個數,計算出位移量。
4 傳感器信號的提取電路設計
如圖3所示是傳感器信號提取電路。光電編碼器輸出的信號通過74LS244進行整形后,輸出理想的A、B相波形,U3(74LS74)是D觸發器,把傳感器輸出整形方波信號的A相輸入D1,B相作為D觸發器的時鐘信號CK,U3與U9(7400)共同組成鑒相電路,判斷光電編碼盤是正轉還是反轉。
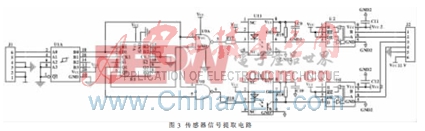
當光電編碼器正向旋轉時,通道A輸出波形超前通道B輸出波形90°,D觸發器輸出Q為高電平,Q為低電平,上面U9A與非門關閉保持高電平,計數脈沖不能通過U11;此時,下面U9B與非門打開,其輸出計數脈沖D能夠順利通過U12進行傳輸,如圖4(a)所示。
當光電編碼器逆時針旋轉時,通道A輸出波形比通道B輸出波形滯后90°,D觸發器Q輸出為低電平,Q為高電平,上面U9A與非門打開,其輸出計數脈沖C能夠通過U11進行傳輸;此時,下面U9B與非門關閉保持高電平,計數脈沖不能通過,如圖4(b)所示。











評論