用80C196KC單片機實現太陽跟蹤

0 引 言
本文引用地址:http://www.j9360.com/article/172122.htm聚光式太陽集熱器盡管必須精確地跟蹤太陽,以確保好的效果,但仍然比普通的平面太陽集熱裝置有著明顯的優勢,特別是中溫和高溫應用。
各種型式的裝置,從簡單到復雜,應用于太陽跟蹤,主要可以分成兩大類,即機械系統和電控系統。電控系統一般說來有較高的穩定性和跟蹤精度。電控系統又可以進一步分為兩大類:
1)用光學傳感器作為反饋的模擬控制系統;
2)計算機根據數學公式計算太陽位置進行跟蹤,并通過光學傳感器作為反饋的數字系統。
根據傳感器工作的模擬系統適應性較差,在多云天氣會盲目跟蹤云層邊沿的亮斑,造成能源的浪費和機械的額外磨損。
數字系統一般被認為具有較高的精度和較好的適應性,但是系統復雜而昂貴。
如果適當地對系統的計算對象進行簡化,就可以用成本較低的單片機代替昂貴的可編程控制 器或者微型機實現數字化的跟蹤控制系統。從而大大降低系統的成本,同時保留數字系統特有的靈活性和精確度。
1 系統描述
本文所述系統的跟蹤策略是根據日期和時間控制聚光器的運動,并利用光學傳感器調整聚光器的初始位置,在運行中對聚光器的位置進行校正。
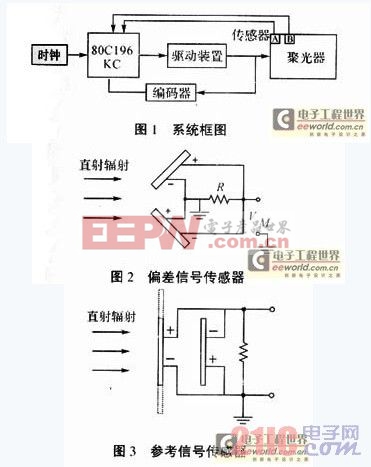
如圖1所示,系統由6個部分組成,分別是時鐘、單片機、驅動機構、編碼器、聚光鏡和傳感器。系統的核心部件是80C196KC單片機。
單片機利用時鐘提供的日期和時間,計算出聚光鏡的預期位置,與編碼器提供的當前位置比較,輸出控制信號。驅動裝置根據單片機提供的信號轉動聚光鏡,同時通過編碼器將運行速度或位置增量反饋到單片機,形成閉環控制系統。
由于當前位置是由增量式計算得到的,若當前位置的計算出現偏差,則不能夠由反饋得到校正,從而形成累積位置偏差。為此,必須通過傳感器監視聚光鏡的位置是否與太陽偏離,當偏離時啟動一個校正程序,達到消除當前位置誤差的作用。
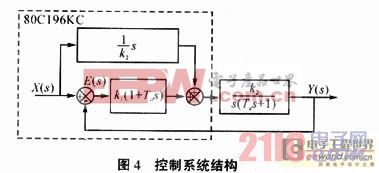
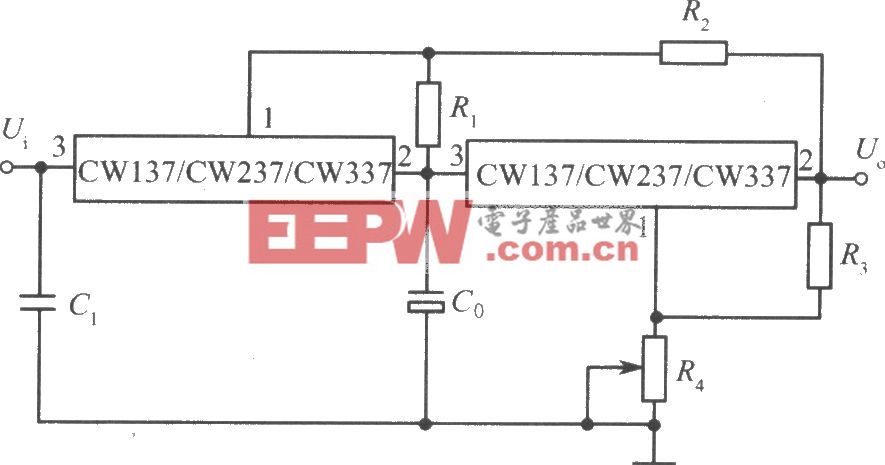
光學傳感器A和B隨聚光器一起運動,為單片機提供太陽輻射信息。傳感器A采用文獻[1]提到的金字塔形布置的光電池組,4塊光電池分成兩組,分別提供方位角和高度角的偏差信號,當聚光器軸線指向太陽時,輸出零信號;偏離時,信號隨偏離的角度以及太陽直射輻射強度的增加而增加(圖2)。傳感器B由一塊接受全天輻射的光電池和一塊遮擋直射輻射的光電池組成,提供太陽直射輻射強度信號,信號隨直射輻射強度值的增加而增加(圖3)。傳感器A和B選用的所有光電池應盡量保持一致。
1)判斷天空直射輻射的強度,在直射輻射較弱時不啟動校正程序,從而避免多云天氣的盲目跟蹤;
2)通過簡單的修正運算,降低甚至消除環境(太陽輻射、溫度等)對偏差信號的影響,使修正后 的偏差信號在偏差角度相同時,能夠較為一致。
2 控制系統
6位單片機80C196KC具有較強的運算能力,通過編制程序可以完成浮點數的基本運算。由于太陽在天空的位置可以由緯度、日期和時間完全確定,因此利用這些信息可以達到精確跟蹤 的目的。控制系統框圖如圖4所示。
如前所述,系統采用單片機計算出的太陽方位作為聚光鏡位置期望值輸入,驅動裝置的輸出作為反饋構成閉環系統。為了達到穩定性和精確度的要求,分別采用了PD調節器和補償通道。










評論