基于AVR單片機的自由立體顯示背光控制系統

摘要:為實現立體顯示,設計并實現了基于單片機的LED背光控制系統。該系統采用單片機ATmega128為控制處理器,加以外圍電路,利用RS 232接口實現與PC機人眼跟蹤模塊的實時通信。同時,充分利用下位機資源,在單片機上實現Kalman濾波,提高人眼定位精度,并利用Kalman預測,將跟蹤速率提高一倍,有效減輕了顯示器的閃爍現象。
關鍵詞:自由立體顯示;LED;ATmega128;RS 232;Kalman濾波
0 引言
人眼視覺是立體的,立體的視覺帶給人類的不僅僅是可以判斷觀看對象的空間狀態,它和顏色一起,使這個世界更加豐富多彩、變化萬千。2010年伊始,隨著立體電影《阿凡達》的熱映,在世界各地掀起了一股3D的熱潮,3D技術成為各界關注的焦點。三菱、索尼、LG、三星等各大顯示器廠商相繼推出自己的立體電視,并寄希望于立體電視市場的開發。
立體顯示技術經歷了多年的發展,無論在顯示質量,還是實現方法上都有了很大的進步,自由立體顯示由于不需要佩戴任何輔助工具,因此正在成為立體顯示發展的方向。其中,以LCD為基礎,基于視差的立體顯示技術由于技術成熟且實現工藝不復雜,成為最有可能實現商業化的熱門技術之一。基于AVR單片機的自由立體顯示系統正是在這一技術的基礎上,利用特殊的光學部件和LED照明陣列實現的。
Kalman濾波是一種線性最小方差估計,算法采用遞推形式在時域內濾波,數據存儲量小,預測精度高,適用于對多維隨機過程進行估計,這個估計可以是對當前目標位置的估計(濾波),也可以是對于將來位置的估計(預測)。常用于從一組有限的,包含噪聲的,對物體位置的觀察序列中得到關于物體位置的好的估計。在自由立體顯示系統中,單片機在進行電路控制的同時還對人眼位置信息進行Kalman濾波和預測。
1 系統的工作原理及總體方案設計
1.1 立體顯示的實現原理
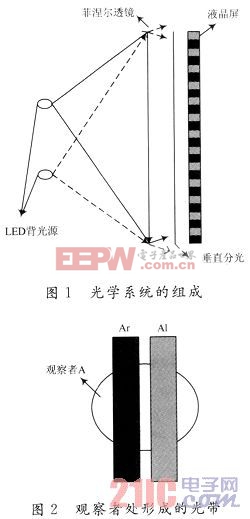
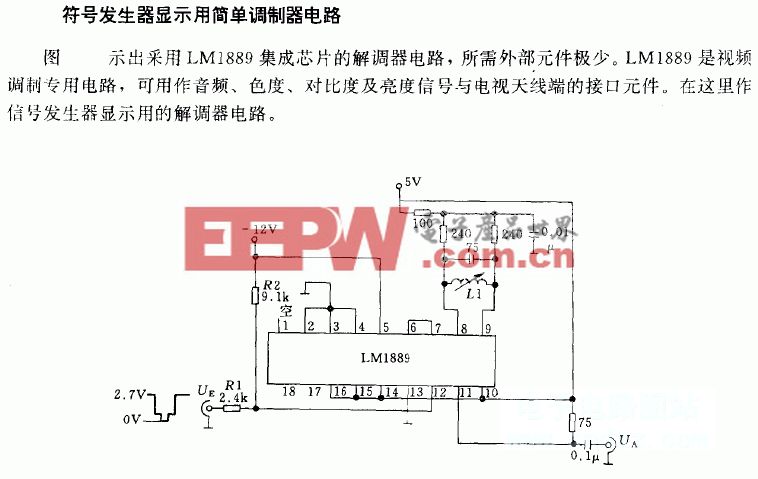
視差立體的實現原理是將一對立體圖像分別送入人的左右眼睛,經過大腦融合后就可以產生立體效果。根據這一原理,設計了一款立體顯示器,17寸LCD的奇數行和偶數行分別顯示左右立體圖像,光學部分利用菲涅爾透鏡控制光路的走向,垂直分光裝置使位于不同垂直位置的兩組LED背光源只能分別照亮LCD屏幕的奇數行或偶數行,如圖1所示。同時,兩組光源的水平位置也有差別,這樣就為左右眼分別提供了只能看到奇數行或偶數行的可視區域,如圖2所示。當觀察者在屏幕前自由移動的時候,通過攝像頭探測到人眼的位置信息,用單片機控制LED照明陣列在適當的地方點亮,保證始終提供正確的可視區域,實現自由立體顯示。










評論