基于μC/OS-Ⅱ的實時分層調度算法研究

(該子系統模塊1中的任務在最壞的情況下,完成任務的時間分別為:
R11=RL-1+E1=2+0.5=2.5
R12=2*RL-1-(1-E1)+E2=5-0.5+1.2=5.7
R13=3*RL-1-(2-E1-E2)+E3+E1=9-1-0.3+0.8-0.5=9
而按照分層模型可調度性公式(2.2a)迭代計算可知Rij最大響應時間分別如下:
R11(max):初始預設值為t(1)=0.5(即任務的執行時間),用該值替代t,發現公式(2.2a)左邊等于0.5,但右邊為0,不滿足公式(2.2a),第二次迭代中,t(2)= =3,經計算發現針對該t值,公式(2.2a)成立,因此T11的最大響應時間為3,依次可計算第一個子模塊中其它兩個任務的最大響應時間分別為 R12(max)=6,R13(max)=9。
由此可知系統在分層調度情況下,子模塊M1中的任務最壞情況下的調度能在最大響應時間內運行完畢。同理,對其它2個模塊中的任務逐個檢驗它的可調度條件,可判別出子系統模塊中的任務在最壞情況下的調度能滿足最大響應時間的要求,從而保證分層情況下任務的可調度性。
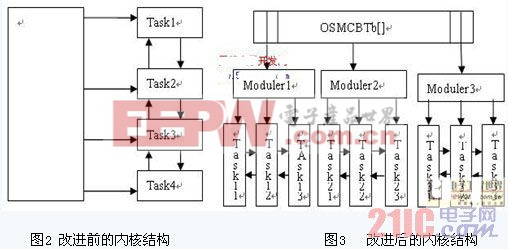
2.2 實現分層調度的μC/OS-Ⅱ內核結構修改和擴展
為了實現分層調度,需要修改和擴展μC/OS-Ⅱ內核結構。創建一個模塊控制塊MCB,以此作為模塊標識,將屬于同一模塊的任務TCB掛在同一模塊任務鏈上,在調度過程中,子模塊按固定時間輪轉調度,子模塊中任務的調度仍然保持μC/OS-Ⅱ按優先級的搶占式調度策略按RM調度算法進行。為實現分層任務的級聯查找,需要創建兩級索引表,一級指向子模塊,另一級索引子模塊中的任務,原內核結構如圖2所示,改進后的內核結構如圖3所示。
具體的調度算法如下 :
OS_Layered_Sched(){
OSMCBRdy = Get a ready submode;/* 控制塊就緒指針指向一個子模塊*/
if ( OSMCBGetCycle_Piece = =ture ) {/*子模塊得到固定時間分配。*/
if (MCBTb[].TaskTcb[].Rdy==ture) /*查看其中是否有就緒的任務,如果有,則調度*/
{OS_ENTER_CRITICAL();
OS_PRIOCYCLE_RDY =(INT8U)(z+(y3+)+OS_UnMapTb1[OSRdyTb1[y]];
/* z是用來確定模塊的地址*/ OS_sched();
OS_EXIT_CRITICAL()}
else {
if( MCBTb!= MCBTb[n]) /*判斷是否到了最后一個子模塊*/
{ MCBTb= MCBTb->next; }/*是,指向下一個子模塊,否,指針回到第一個子模塊*/
Else
{ MCBTb = MCBTb[1] }
}
}
3、實驗仿真及結果分析
移植μC/OS- Ⅱ實時操作系統到PC機上,以BC++4.5為開發平臺,完成分層調度算法下任務的調度執行,結果如圖4所示。
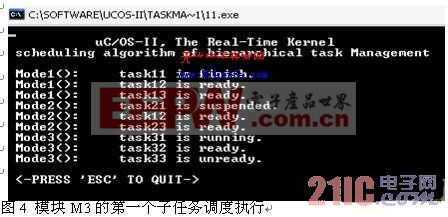
實驗結果顯示,改進后的算法可以實現分層子模塊中任務的調度,調度器運轉正常,證明了分層調度算法的可行性。在執行多次后,如有任務完成,它就脫離原來的鏈,重新調整兩級索引表,并按調整后的兩級索引表引起新的調度。







評論