基于SPCE061A的智能小車機器人的設計

2) 語音輸出電路。
小車的語音輸入電路如圖3所示。其中, VDDH 為參考電壓, VSS是系統的模擬地。音頻信號由SPCE061A 的DAC引腳輸出送到電路的9端, 通過音量電位器R9的調節端送到集成音頻功率放大器SPY0030, 經音頻放大后, 音頻信號從SPY0030輸出經J2端口外接揚聲器播放聲音。
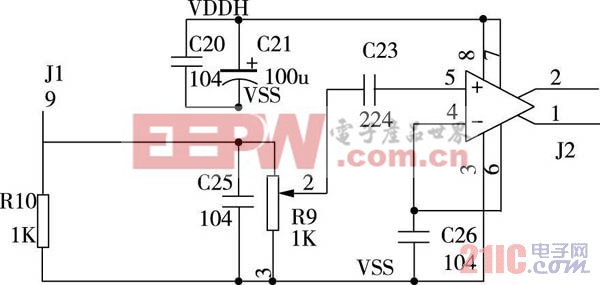
圖3 語音輸出電路
3) 光電檢測電路。
小車的光電檢測電路采用E18-D80NK型號的光電傳感器, 它集發射和接受于一體, 紅外發射管向某一方向發射紅外線, 遇到障礙物后紅外線被反射由接收管接受, 從而判斷出小車的前方是否有障礙物, 對障礙物的感應距離可以根據要求通過傳感器上的微調旋鈕進行調節。傳感器前端增加了透鏡, 利用聚焦作用遠距離探測物體。傳感器內部集成了放大、比較、調制電路, 使傳感器受可見光的影響較小, 光電檢測電路的連接圖如圖4所示。
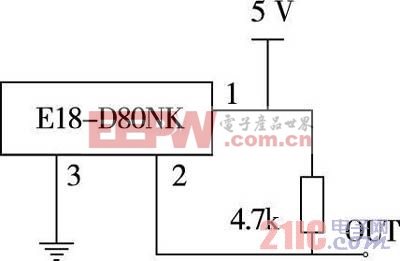
圖4 光電檢測電路
4) 驅動電路。
小車的驅動電路是一個全橋驅動電路( 圖5), Q1,Q2, Q3, Q4四個三極管組成4個橋臂, Q5 控制Q2和Q3的導通和關斷, Q6控制Q1 和Q4 的導通和關斷, 驅動電路分別用于后輪動力驅動電路和前輪方向驅動電路。當1管腳為高電平, 2管腳為低電平時時Q1 和Q4 導通, Q2和Q3截止, 電動機帶動車輪運轉; 當1管腳為低電平, 2管腳為高電平時時Q1和Q4截止, Q2和Q3導通, 電動機帶動車輪反向運轉。
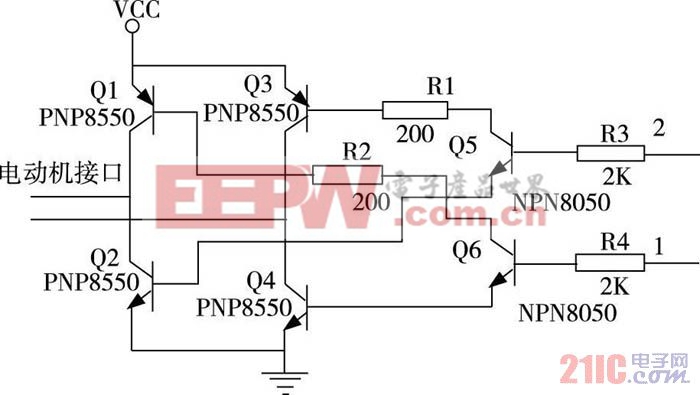
圖5 驅動電路。












評論