基于AVR單片機帆板控制系統的設計

設計任務
本文引用地址:http://www.j9360.com/article/170662.htm設計并制作一個帆板控制系統,通過對風扇轉速的控制,調節風力大小,改變帆板轉角θ,如圖1所示。帆板形式及具體制作尺寸如圖2所示。

圖1 帆板控制系統示意圖
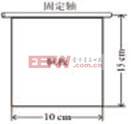
圖2 帆板制作尺寸圖
根據題目要求,設計任務要實現風扇和帆板之間的距離在一定范圍內變動時,在規定的時間內,自動調節帆板達到通過鍵盤設定的預置轉角(下文簡稱:預置參數),同時對控制過程中的相關數據進行實時處理并顯示。
設計思路:以AVR單片機為核心,采用閉環控制,角度傳感器檢測帆板的實際轉動角度,單片機定時采集,與帆板預置參數進行比較,生成調控風扇電機的PWM信號;用LCD屏顯示預置參數、帆板的轉動角度、調節用的PWM信號及調控過程完成的時間等內容。
系統硬件設計與實現
硬件概述
系統由以下幾個基本模塊組成:電源模塊、單片機控制模塊、電機驅動模塊、顯示與聲光報警模塊、鍵盤模塊和角度檢測模塊。整個系統框圖如圖3所示。

圖3 系統框圖
(1)控制模塊:采用AVR單片機控制;
(2)角度檢測模塊:采用ADXL345角度傳感器;
(3)風扇類型:采用軸流式的電吹風風扇;
(4)電機驅動方式:采用L298電機驅動芯片;
(5)顯示模塊:用LCD1602液晶模塊進行顯示;
(6)電源模塊:采用LM2576開關型降壓穩壓芯片。
角度檢測電路
角度傳感器選用三軸加速度計ADXL345。其輸出數據為16位二進制補碼格式,可通過SPI(3線或4線)或I2C數字接口訪問。對ADXL345的數據累計采樣50次,取其平均值作為結果,這種方法成功的解決了風帆擺動不穩的難題。單片機依據該值大小與預置參數運算,最后生成調節風扇電機轉速的PWM信號。
ADXL345與單片機采用I2C模式通信,電路如圖4所示。角度檢測電路由IC1、IC3、R15、R16組成。

圖4 角度檢測電路
驅動電路
電機驅動模塊L298內部包含4通道邏輯驅動電路,是一種為二相和四相電機配備的專用驅動器,內含二個H橋的高電壓大電流雙全橋式驅動器,接收標準TTL邏輯電平信號,可驅動雙電機。電機驅動接線電路如圖5所示。
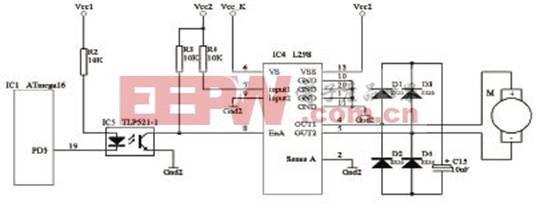
圖5 電機驅動電路
在電路中,風扇電機接在L298的OUTl、OUT2輸出端口上,控制電機正反轉的兩個輸入引腳,7腳通過電阻R4接在電源上,9腳直接接地。控制風扇電機轉速的PWM信號,由單片機的PD5引腳輸出,通過隔離光耦IC5接在使能控制端8引腳上,L298輸出的通斷時間受控于PWM的變化,實現了單片機調節風扇電機的轉速大小,最終控制了吹動帆板轉動的風力強弱。電路中的D1~D4起續流二極管作用。
聲光報警和按鍵電路
系統中設計了聲光報警電路,見圖6所示。當帆板旋轉到預置參數時,由單片機控制其工作,并持續5秒鐘報警。它由電阻R5、R18、發光二極管D5、三極管Q1和揚聲器LS1組成。當單片機的PA5引腳輸出低電平信號時,二極管發光,蜂鳴器發出聲音,實現聲光報警。
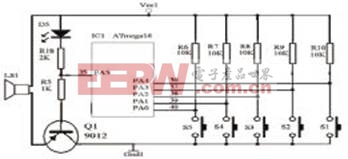
圖6 聲光報警、鍵盤電路
系統中的按鍵功能是控制風帆電機的運動和設定帆板的轉角參數值。各鍵功能如下:
S1:起動鍵,點動后,電機起動;
S2:停止鍵,點動后,電機停止;
S3:確認鍵,首次操作,允許設定預置參數,再次操作,退出,并存儲參數(預置參數存在單片機的EEPROM中);
S4:加1鍵,點動1次,預置參數個位數值加1;
S5:加1鍵,點動1次,預置參數十位數值加1。
電源
LM2576開關型穩壓器的效率比三端線性穩壓器要高的多,有優異的線性和負載調整能力,其內部含有頻率補償器和一個固定頻率振蕩器,可將外部元件數目減到最少且使用方便。電源電路如圖7所示。

圖7 電源電路

pwm相關文章:pwm是什么
單片機相關文章:單片機教程
單片機相關文章:單片機視頻教程
單片機相關文章:單片機工作原理
蜂鳴器相關文章:蜂鳴器原理









評論