用CCD攝像機獲取高速運動目標的圖像

摘要:在超速抓拍系統中,如何用CCD攝像機獲取高速運動目標的圖像是決定方案論證及系統設計成敗的關鍵。文中對電子快門速度和成像的關系及用普通攝像機捕捉高速運動目標可能產生的問題進行了分析并提出選用非標攝像象機時應考慮的幾個主要方面。
關鍵詞:CCD攝像機 物像關系 電子快門 逐行掃描 幀頻率
1 引言
近幾年,國家對基礎建設的投資日益加大,公路建設更是水漲船高。現代化交通監理的需求越來越迫切。公安部已提出:科技強警,向科技要警力。超速抓拍系統正在這種形勢下提出的。
超速抓拍系統實際上是一種智能化交通監理系統ITS(Intelligent Transportation Systems).受測速雷達觸發,CCD攝像機將超速行駛的目標抓拍下來,然后通過數據采集系統將模擬圖像數字化,并送PC機進行圖像信號處理,壓縮后經由網絡與網絡主機進行交互。提供監理部門執法依據。
在此系統中,由于抓拍目標是高速運動的,一般在80km/h以上,有的甚至達到180km/h。因此,如何用CCD攝像機完成對高速目標的清晰捕捉是首先應解決的關鍵問題。
2 CCD攝像機的原理
2.1 CCD攝像機概述
CCD攝像機是一種固體攝像機。CCD是電荷偶合型光電轉換器件,用集成電路工藝制成。它以電荷包的形式儲存和傳送信息。主要由光敏單元、輸入結構、和輸出結構等部分組成。
CCD有面陣和線陣之分。光敏元排成一行的稱為線陣CCD,面陣型CCD器件的像元排列為一個平面,它包含若干行和列的結合。本文所介紹之攝像機為面陣型。
2.2 CCD攝像機原理
根據轉移和讀出的結構方式不同,有不同類型的面陣攝像機。常見的類型有兩種:幀轉移型FT(Frame transfer)和行間轉移型ILT(Interline transfer)。這兩種類型的攝像機的工作原理基本相同。下面以敏通公司MTV-1301型黑白行間轉移型攝像機為例來介紹其原理。
如圖2.1所示,MTV-1301型CCD攝像機包含四部分:CCD光電傳感器、CCD傳感器驅動器、圖像處理板、供電電源。CCD傳感器是一個由542×582個光敏二極管構成的光電傳感器陣列。其結構為行間轉移型。這種器件光敏面積大,靶面利用率高。當景物的光學圖像,經由攝像物鏡投射到這個陣列上時,由于各光敏二極管受光的強弱不同而感生出不同量的光電荷。這些感生電荷,經過一定時間(一場)的積累,在轉移柵的控制下,水平地移送到與像元對應的設置在光敏元旁邊的垂直移位寄存器中,而后又在行轉移脈沖的控制下,將電荷移送到水平移位寄存器,并由水平移位時鐘控制依次向輸出端轉移,最后由輸出電路輸出視頻信號。由CCD傳感器輸出的視頻信號已具有較大幅度(0.5V以上),經由處理電路進行處理(包括自動增益控制、校正、同步信號混合、功率放大等),在終端得到全電視信號輸出。
3 高速目標圖像的獲取
3.1 靜態目標圖像的獲取
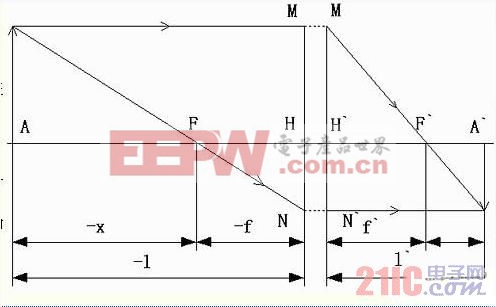
根據光學理論,畫出理想光學系統的物像關系,如圖3.1所示。
其中:l表示物點A到物方主點H的距離,稱為物距。
l`表示像點A`到像方主點H`的距離,稱為像距。
f表示物方焦距。
f`表示像方焦距。
假定光線的傳播方向自左向右為正向光路,則從H點到A點或由H`到A`點的方向與光線傳播方向一致則為正,反之則為負。在圖3.1中,l為負,l`為正。原點取在物距和像距相應的主點。從而有如下的物像關系式:
f`/l`+f/l=1 (3.1.1)
當光學系統位于同一介質(如空氣)中,則f`=-f,從而(3.1.1)變為:
1/l`-1/l=1/f` (3.1.2)
此公式就是高斯公式。表示了以主點為坐標原點的物像關系。
由高斯公式不難看出,當被攝目標處于靜止狀態時,CCD攝像機的分辨率只要足夠高,就應該能攝到此分辨率基礎上的清晰圖像(因為,“清晰”是與分辨率緊密聯系在一起的)。也就是說,目標只要是在大于兩倍鏡頭焦距的位置范圍,而鏡頭的變焦范圍足夠的大且連續,那么,在成像位置和大小一定的情況下(因為,CCD的成像靶面大小固定),并且,其他的光學條件都滿足時,理論上講任意遠的物體都應該能清晰地成像(這也就是為什么有的天文望遠鏡的鏡頭長達數米的原因,它可提供足夠大的變焦范圍)。當然,當CCD攝像機的像素數目一定時,其成像的清晰度則主要受CCD像素數目的限制。
也就是說,當成像大小和位置一定的情況下,對于任意物距都只有唯一的一個焦距與其對應從而得到清晰的圖像。物距變化時焦距必須變化圖像才可能清晰。反之,物距不斷地或大或小地變化,而焦距不變,那么光學系統所成圖像將肯定是模糊的。模糊的概念就是分辨率不夠高,即分不清圖像的細節,相反清晰就是分辨率高能看到圖像更多的細節!這也正是傻瓜像機不能照出很清晰照片的原因。因為它的焦距是固定不變的。當然,它有一個最佳點來得到清晰的圖像。對于不管什么地方的物體,它都以一種模式去對待,怎么能得到清晰的圖像呢?當我們有時要求不高時,比如看清楚人的眼睛等較大較粗糙的對像時,在很大一個范圍,我們都認為得到了清晰的圖像,雖然實際上是不清晰的,因為,它得分辨率不夠,看不到圖像的細節。
3.2 高速目標圖像的獲取
當被攝物體處于高速運動時的情況可不像靜態時那么簡單。特別是用于高速公路監理的超速抓拍系統更是如此。下面就以超速抓拍系統為例來分析如何獲取高速運動目標的圖像。
如圖3.2所示:
H:攝象機與測速儀架設高度
20°:測速儀波束軸與水平面(地面)夾角
12°:攝象頭光軸與水平面夾角
R2:雷達波束打到地面上其中心與架高之間的水平距離
R5:攝象頭光軸和地面交點與架高之間的水平距離
ΔR1:雷達波束區域
ΔR2:攝象機攝像區域

測速儀相關文章:測速儀原理
激光二極管相關文章:激光二極管原理





評論