一種新型極低速異步電機無速度傳感器控制方法

1引言
本文引用地址:http://www.j9360.com/article/163455.htm近年來,異步電機的無速度傳感器矢量控制成為研究熱點。目前,異步電機無速度傳感器矢量控制在中高速段已獲得良好的控制性能,但在極低速段(1Hz)卻仍未實現良好的控制。這是因為常用的異步電機無速度傳感器矢量控制方法需要利用反電勢,而反電勢在極低速時很小,受采樣精度和電機參數變化影響較大,導致控制性能降低,無法實現極低速段的無速度傳感器矢量控制。
為了實現極低速段的異步電機無速度傳感器控制,研究人員提出了各種控制方法。其中研究較多的是高頻信號注入法,利用注入的高頻定子電壓信號產生的電流響應來估計轉子位置[1]-[5]。這些基于高頻信號注入的方法都利用了異步電機的非理想特性,如轉子凸極、齒槽效應及飽和效應等。但是,這些基于高頻信號注入的方法存在一個共同的缺點,即高頻響應信號常常與其他高頻諧波混合在一起,較難分離。需要采用復雜的信號處理方法獲得所需高頻響應信號,從而降低了系統響應速度,增加了控制系統的復雜性。此外,由于基于高頻信號注入的方法利用了異步電機的非理想特性,因此受電機結構影響較大,缺乏一定的通用性。
為避免上述高頻信號注入法所固有的各種問題,本文提出了一種基于低頻信號注入的方法。該方法將文獻[5]中的高頻諧波信號變為低頻諧波信號,通過注入低頻d軸定子電流信號,利用產生的角度誤差估計電機轉速。該方法僅利用異步電機的基波模型,不依賴各種非理想特性,所以不受異步電機結構影響,具有普遍的適用性。此外,該方法所需低頻響應信號容易分離,消除了高頻信號注入法信號分離難的缺點,而且對電機參數具有較強的魯棒性,無須進行參數估計,使得控制系統結構相對簡單。仿真及實驗結果證明,本文提出的基于低頻信號注入的方法可以很好地實現極低速段異步電機無速度傳感器矢量控制。
2低頻信號注入法原理
由異步電機數學模型及運動方程可知,異步電機的電磁轉矩可表示為: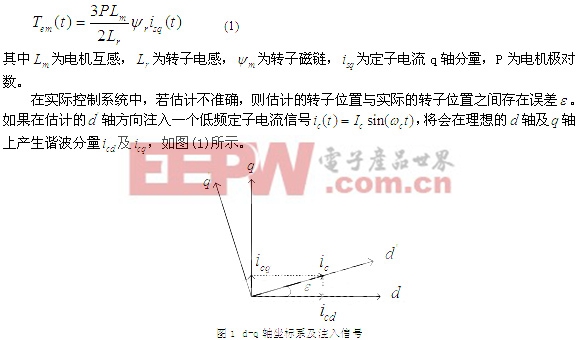


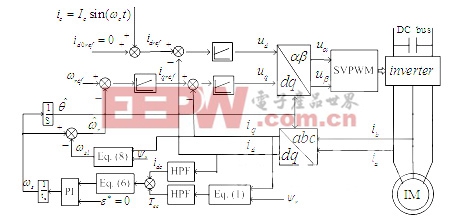
圖2低頻信號注入法系統控制原理框圖
3電機參數魯棒性分析
由上述分析可知,本文提出的低頻信號注入法僅與注入信號及其引起的轉矩響應有關,而與異步電機的定子電阻和轉子電阻無關,因此對定轉子電阻有很好的魯棒性。
此外,由于在滑差轉速計算中用到了轉子時間常數,因此的變化會影響到估計轉速的準確性。盡管如此,由于在同步轉速估計中并未用到轉子時間常數,所以的變化對轉子磁鏈角度的估計沒有影響。因此,本文的方法對轉子時間常數也具有良好的魯棒性。













評論