基于CAN總線的聯合收割機智能控制系統的設計與實現

摘要:本文介紹了一種以P87C2591單片機為主控器,以谷物流量傳感器、谷物濕度傳感器、割臺高度傳感器、地速傳感器、升運器轉速傳感器、DGPS接收機、變量作業控制和智能控制終端為主要外圍元件的聯合收割機智能控制系統。此系統具有顯示直觀、準確,使用方便、可靠等優點,代表了聯合收割機智能控制系統的最新發展趨勢。在系統設計過程中充分考慮了性價比,選用價格低、性能穩定的元器件。通過運行調試,試驗結果與設計要求基本一致。
關鍵詞:CAN總線;聯合收割機;智能控制
1 系統組成及工作原理
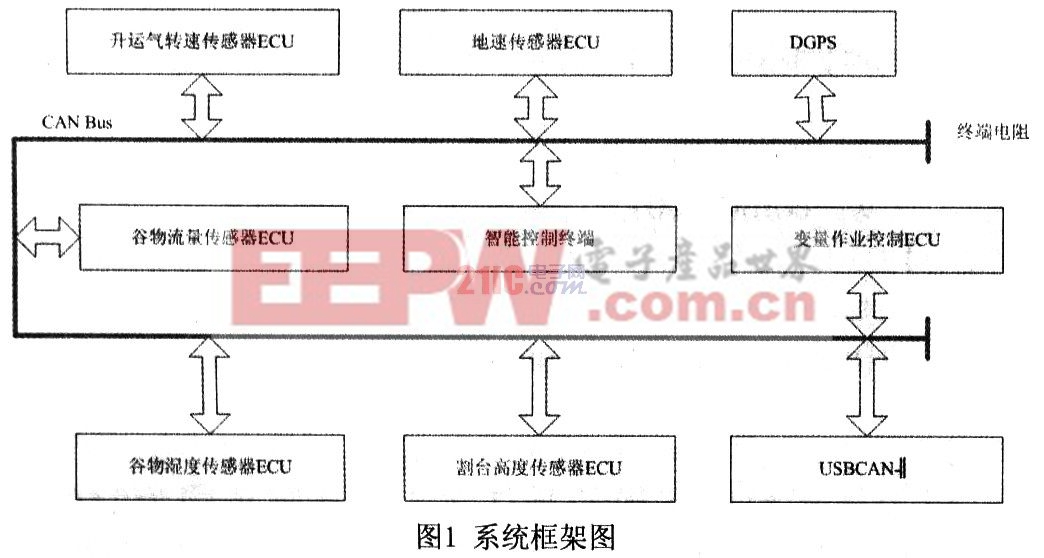
整個系統可以分成兩個獨立的部分:產量監測子系統和變量作業控制子系統。它們分別用來實現產量監測和變量作業控制的功能。系統框圖如圖1所示。系統中所有節點都是“即插即用”的,當其與總線連接或者斷開時都可被控制終端檢測到。當需要實現產量監測的時候,可以把變量作業控制ECU斷開,只要在總線上連接實現測產的各傳感器ECU、DPGS以及智能控制終端即可;當需要實現變量作業控制的功能時,可以斷開系統中不需要用到的傳感器ECU,連接上變量作業控制ECU以及地速傳感器ECU即可。在兩個子系統中,智能控制終端都必須連接在總線上,它監視著各節點的狀態并且監控系統的運行,USBCAN-II是系統的一個附加節點,它是周立功發展有限公司生產的一種CAN-bus智能轉換卡,通過USB電纜與PC連接,就可以在PC機上實時觀察CAN總線上的所有報文,并進行CAN-bus網絡數據分析和處理,有利于系統的調試和實驗分析。
2 硬件構成
本系統硬件主要包括以下幾個模塊:集成有CAN控制器的增強型P87C591單片機主控模塊、電源模塊、傳感器模塊、人機交互接口模塊、U盤文件讀寫模塊等。其中P87C591微處理器負責接收和處理總線上各傳感器采集到的數據和GPS數據,還負責發送控制命令等數據給總線上的其他節點;傳感器完成信號的采樣功能,微處理器通過U盤文件讀寫模塊與U盤相連,用于存儲產量和其他傳感器,并且讀取存儲在U盤內的作物管理、變量作業處方圖文件;通過RS232通用串行接口,微處理器和液晶顯示器及觸摸屏相連,實現人機交互的功能。
2.1 主控模塊選型
系統采用Philips半導體公司生產的集成有CAN控制器的增強型P87C591,它是一個8位高性能微處理器,44引腳,除了具有51系列微處理器的通用功能和片內CAN控制器外,還集成有6路模擬輸入的10位ADC,并可選擇快速8位ADC,2個8位分辨率的脈寬調制輸出(PWM),帶字節方式主、從功能的I2C總線串行I/O口,以及片內看門狗定時器T3。此外,它還具有4個中斷優先級,15個中斷源。P87C59l微處理器采用了強大的80C5l指令集,并包括Philips半導體SJAl000獨立CAN控制器的PeliCAN功能。
2.2 電源模塊設計
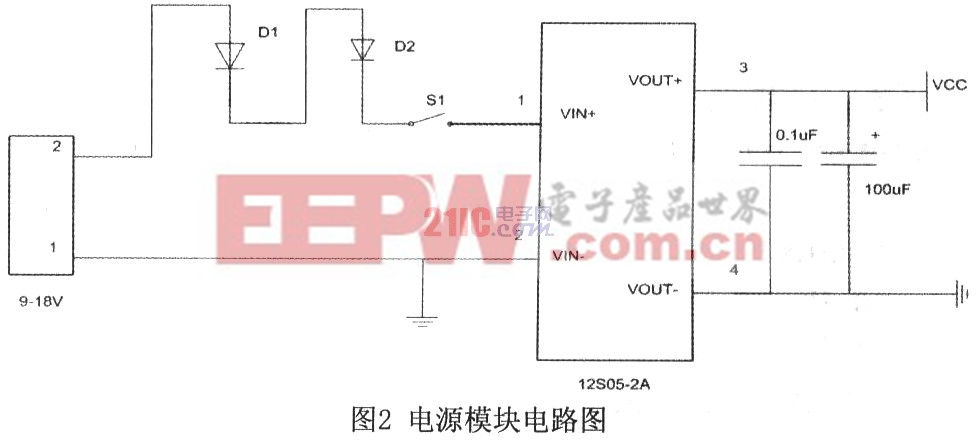
電源模塊提供系統正常運行所必需的電源,其電路如圖2所示。采用了12V轉5V的DC-DC模塊,輸入端電源來自聯合收割機的車載蓄電池,通過CAN總線電纜的電源線和地線接入控制終端,并能提供2A的負載電流。











評論