基于AVR單片機的滅火機器人設計與實現

摘要:根據滅火機器人的競賽規則,給出了滅火機器人的硬件結構設計方案和軟件設計流程。所用的機器人處理器為AVR單片機,主要利用紅外傳感器、光敏傳感器對環境進行檢測,使機器人在場地中按照預定的方案尋找火源并撲滅。
本文引用地址:http://www.j9360.com/article/162619.htm關鍵詞:滅火機器人;傳感器;ATmega32
1 引言
機器人競賽是近年來迅速開展起來的一種對抗活動,它涉及人工智能、機械、電子、傳感器、精密機械等諸多領域。通過競賽可以培養學生的創新意識、動手能力、團隊寫作能力等。其中滅火比賽是開展范圍最廣、影響最大的機器人競賽項目之一。
比賽規則為模仿生活中消防員滅火,機器人從H點出發,在四個房間內尋找任意擺放的蠟燭,并且設法將其滅掉。比賽場地的墻壁高33cm,材質為木板,顏色為黑色。尺寸如圖1所示。對于比賽,得的分越低成績越好。另外根據選擇的模式不同,計分時要乘上相應的系數。
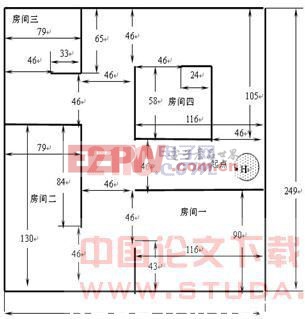
圖1比賽場地平面結構
2 系統硬件設計
2.1 系統總體設計
系統以ATmega32單片機為核心,它是一種基于增強RISC結構的、低功耗的8位單片機。其特點為:①片內具有32K字節的可編程Flash;2K字節的片內SRAM數據存儲器;1024個字節片內在線可編程EEPROM數據存儲器。②片內含JTAG接口。③外圍接口。兩個帶有分別獨立、可設置預分頻器的8位定時器/計數器;一個16位定時器/計數器;四個通道的PWM輸出;8路10位ADC;32個可編程的I/O口。④低功耗,最高工作頻率為16MHz。













評論