基于Elmo數字伺服控制器的機載吊艙陀螺穩定平臺設計

在民用市場,國內現有的機載吊艙陀螺穩定系統大多采用模擬伺服控制器,存在多方面的缺陷,比如:體積大,笨重,容易產生漂移,不易調整,伺服控制效果不好,無法實現數字通信等,因此無法采用諸如FPGA這樣的芯片去處理運動信號,成了性能無法提升的瓶頸,不能很好地滿足市場需求。
Elmo公司的Whistle系列數字伺服控制器,體積小、重量輕、提供數字輸入與輸出接口,提供RS232與CAN總線2種通信方式,可編程。采用Elmo Whistle數字伺服控制器,通過編程,僅需設計相對簡單的一部分外圍電路,就能實現很復雜的功能,體現出極大的優越性。但目前國內應用這一控制器來實現機載吊艙陀螺穩定平臺的廠家比較少,因此可以借鑒的經驗非常有限。本文通過仔細研讀Elmo相關文檔,設計出了符合性能指標的機載陀螺穩定平臺。
1 吊艙及陀螺穩定平臺
吊艙是指懸掛在運動載體(如飛機、船舶)外的艙體有效載荷容器裝置。它的作用主要是隔離載機的姿態變化和機械振動對光電傳感器指向的影響。吊艙系統由陀螺穩定平臺伺服平臺、電視跟蹤系統、座艙顯示和控制系統、紅外測量系統、激光測距儀和GPS定位于測距數據鏈系統、數據采集和記錄系統、吊艙環控系統等7部分組成。
陀螺穩定平臺系統主要用于穩定機載吊艙上TV和紅外攝像機的視軸穩定,消除直升飛機飛行過程中由于搖擺帶來的干擾力矩。這里設計的平臺屬于二軸四框架系統,分為方位軸和俯仰軸。在每一個軸上安裝一個單自由度的光纖陀螺,用來感應干擾力矩。陀螺輸出信號經過放大濾波后,送到Elmo伺服控制器,由控制器智能處理陀螺信號。信號處理完畢之后,由控制器的輸出部分,驅動直流伺服電機,實現整個系統的穩定。
2 穩定平臺設計
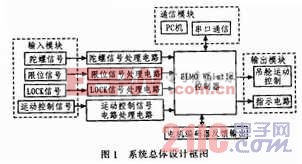
2.1 系統總體設計框圖
此文設計的陀螺穩定平臺主要是要保證各個光傳感器的視軸穩定。結合整個吊艙系統,主要是實現以下6個功能:
1)現吊艙的穩定控制;2)實現吊艙的運動控制;3)限位信號輸入;4)錯誤指示電路;5)LOCK電路;6)串口通信。
圖l為系統總體設計框圖。
2.2 硬件電路設計
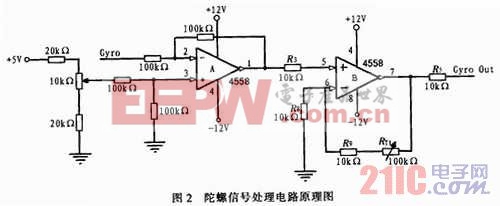
2.2.1 陀螺信號處理電路
由于俄羅斯的Fizoptika VG94l-3AS光纖陀螺輸出信號非常微弱,輸出比例因子只有3.3 mV/deg/s。對于這么微弱的信號,必須要先進行小信號的放大電路處理,才能傳送到Elmo伺服控制器,進行下一步的處理。這里要說明的一點是,并沒有對陀螺輸出信號進行濾波處理,原因在于Elmo伺服控制內部已經有了數字濾波電路,可以在調試時進行相關設置,以達到濾波目的。
Elmo數字伺服控制器原本有2個模擬輸入口的,可直接將光纖陀螺的輸出信號接入數字伺服控制器,但由于陀螺的隨機漂移大,基本無規律可以遵循,每次開機,給陀螺供電時,陀螺的隨機輸出是不一樣的。所以,應設計陀螺信號處理電路,一方面可以將陀螺的輸出信號按一定比例的放大,然后輸入到Elmo數字伺服控制中,減少程序中的比例因子,進而減少Elmo數字伺服控制器內部的噪聲對整個系統的影響,另一方面通過外接一只可調電阻,實現每次開機的漂移量補償,從而使吊艙保持平穩狀態。
Fizoptika VG941-3A光纖陀螺在載體靜止時,輸出電壓為2.5 V。因此要保證載體靜止時,輸入到Elmo數字伺服控制模擬輸入口的電壓為0 V,必須用一個精準電壓芯片產生2.5 V的電壓,通過放大器4558實現一個減法電路。在該減法電路中,用REF02CZ產生5 V的電壓,然后通過電阻分壓得到2.5 V基準電壓。圖2為陀螺信號處理電路(減法電路)原理圖。
2.2.2 電源電路設計
這里的電源電路設計主要的目的是給各芯片提供基準電壓。TSMl212D用于產生±12 V基準電源,給放大器4558和REF02CZ提供基準電壓,而REF02CZ用于產生+5 V基準電壓,給放大器提供參考電壓。圖3為電源電路原理圖。

伺服電機相關文章:伺服電機工作原理
















評論