基于C8051F020的智能氣動泵控制系統的設計

模糊控制器采用雙輸入、單輸出的二維結構。輸入變量為瞬時流量偏差e和偏差變化c,輸出變量為控制量u。其模糊子集分別為
E={NL, NM, NS, NO, PO, PS, PM, PL}
C={NL, NM, NS, O, PS, PM, PL}
U={NL, NM, NS, O, PS, PM, PL}
它們的論域分別為
E={-6,-5,-4,-3,-2,-1,-0, +0, 1, 2, 3, 4, 5, 6}
C={-6,-5,-4,-3,-2,-1, 0, 1, 2, 3, 4, 5, 6}
U={-7,-6,-5,-4,-3,-2,-1, 0, 1, 2, 3, 4, 5, 6, 7}
當瞬時流量變化時,通過驅動調節閥,控制其開啟的大小及變化規律,使偏差趨近于零。根據氣體流量的參數特點和現場實際操作經驗及專家的知識理論,總結出模糊控制規則表,如表1所示。
表1 模糊控制規則表
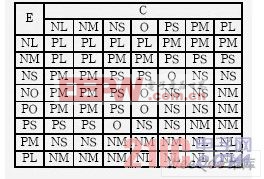
選擇模糊控制規則是模糊控制器的關鍵問題。為了更好地提高控制精度,本系統采用帶有4個調整因子的控制規則:
其中,0α1α2α3α41,本系統選擇:α1=0.26,α2=0.58,α3=0.76,α4=0.86。代入上式運算后經反復修改和實際調試,得到了實用的模糊控制查詢表,如表2所示。
表2 查詢表

4.系統的軟件設計及抗干擾措施
4.1 下位機程序設計
下位機程序主要進行C8051F020單片機系統的初始化、端口配置、A/D初始化、液晶以及鍵盤掃描初始化。為防止誤動作,無意中改變系統的有關參數,造成人為計量誤差,系統可設置“密碼”,保證測量的可靠性和準確性,具體流程如圖6所示。
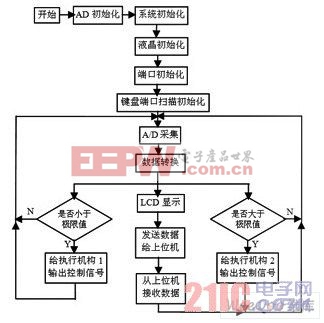
圖6 流程圖
模糊控制中的控制算法由程序實現。包括兩部分,一是離線計算模糊控制查詢表,二是在實時控制過程中在線輸入變量,并將它們作模糊量化處理,然后查找模糊控制查詢表后進行輸出,去控制調節閥的開啟角度,來實現對氣體流量的控制。
3.2 上位機部分
上位機程序采用Lab Windows/CVI設計,主要實現對采樣氣體流量、兩個流量限值的接收和顯示,還可對流量限值進行修改和發送給下位機。
3.3 抗干擾措施
為提高控制系統的穩定性,加強抗干擾能力,可采用隔離電源變壓器,信號通道采用光電隔離和濾波技術;可使用Watchdog技術和軟件陷阱防止程序跑飛,實現任務的恢復;采取電源抗干擾措施。












評論