基于FPGA的智能小車設計

NiosⅡIDE包含一個強大的、在GNU調試器基礎之上的軟件調試器——GDB。完成軟件代碼的編寫后,可以對代碼進行仿真和調試。Nios-ⅡIDE提供了一個方便的閃存編程方法。任何連接到FPGA的兼容通用閃存接口(CFI)的閃存器件都可以通過NiosⅡIDE閃存編程器來燒結。針對本設計及應用,編寫了系統控制程序和LCD顯示程序。流程圖如圖3所示。本文引用地址:http://www.j9360.com/article/162206.htm
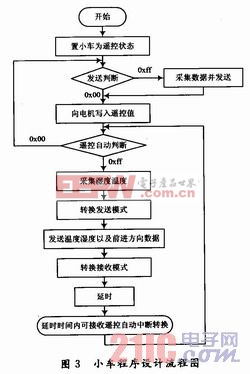
3 系統調試
小車系統需要測試能否準確接收控制臺發送的指令并控制小車運動或停止,以及向前、后、左、右轉向。還要測試主控機能否準確接收小車采集到的溫度以及濕度信息,能否正確顯示。經過多次測試,發現由于系統程序是采用收發循環轉換的模式,為了讓兩個系統能夠收到對方發的信息,對小車的遙控與自動部分進行簡單的分化。自動情況下,控制臺為主要接收端,小車為主要發送端,一般情況下小車發送數據到控制臺,需要自動到遙控的轉換時,通過在延時時間內進行中斷來實行從自動到遙控的轉換;在遙控狀態下,控制臺為主要發射端,小車為接收端,一般情況下控制臺發送小車行進指令到小車,需要采集數據時,通過溫度、濕度采集按鍵來對小車進行收發轉換,同時小車發出采集數據指令,之后再次轉為接收模式。這樣做之后使小車與控制臺的軟件部分清晰明了,小車的行進以及采集顯示數據能夠實時的進行。
濕度測量系統需要測試是否能夠精準輸出頻率值。采用芯片LM555手冊上推薦的電路,由于元件的誤差,使輸出的頻率并不精確,經過與標準的濕度儀進行比對,通過參數調整,用直線做近似,最后得到的頻率值誤差在幾赫茲(頻率范圍是6 008~7 314Hz),經過預算得到很準確的濕度值。開始求濕度值時用的是解一元三次方程的方法,由于計算量大,對小車的行進會有很大影響,后來在小車端只是把小車采集到的頻率值通過紅外天線傳輸到主控端,并將原先的小車自動避障由NiosⅡCPU控制改為由Verilog編寫的硬件模塊控制,最后在控制臺做濕度值的計算。這樣的更改既減少了小車NiosⅡCPU的工作量,同時由于小車的自動避障改為由獨立的Verilog模塊控制,運行起來很流暢。
對于無線收發系統,要測試其可靠性以及發送或接收的信息的準確性。測試方法是單獨設計了一個軟核下載到SoPC中,并編寫一段程序用于測試是否正確寫入配置控制字,是否能夠進行ShockBurst模式的接收或發送。問題是對天線各模式時序的把握,一開始寫的程序總是不能正確寫入配置字,反復調試,并用數字示波器觀察寫入配置字的瞬間過程以及各延時的時間,最后測試成功,并把發送或接收的狀態用LED顯示出來,每發送或接收到一個數據包就讓LED閃一下。
4 結語
本設計以FPGA嵌入NiosⅡ軟核處理器為核心,輔以必要的外圍電路,構成了高度集成化的片上系統。另外,SoPC系統的柔性配置,使得可以基于此系統擴展片外存儲器和多路輸出。設計的小車具有較強的避障能力,且能通過接收端對其進行方便的控制,溫度和濕度采集均達了較高的精度,并且能實現動態顯示,無線收發模塊的有效范圍最遠可達300 m,可應用于較為惡劣的環境,可代替人進行溫度和濕度的實地檢測。












評論