基于PIC單片機的傾角傳感器的設計

介紹傾角傳感器的工作原理,對PIC16C72與傾角傳感器的硬件接口電路及其軟件進行了設計,并且該設計已經由實驗得到驗證。
本文引用地址:http://www.j9360.com/article/162133.htm0 前 言
設計中的傾角傳感器是新型變質面積電容式傾角傳感器,該傾角傳感器技術是為數不多的、能夠兼有結構簡單、可靠性高、有通用傳感器集成電路等優點的傾角傳感器技術之一。在測繪儀器儀表、建筑機械、天線定位、機器人技術、坦克和艦船火炮平臺控制、飛機姿態、汽車電子控制、石油勘探、海上平臺監控等方面有廣泛應用。
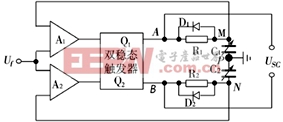
圖1 傾角傳感器原理圖
1 傾角傳感器的工作原理
傾角傳感器的電路原理如圖1所示。
檢測電路由比較器A1、A2、雙穩態觸發器及電容充放電回路組成。C1、C2為可變介質面積電容式傾角傳感器,其容量大小與傾角變化成比例。雙穩態觸發器的兩個輸出端A、B作為差動脈沖寬度調制電路的輸出。設電源接通時,觸發器的A端為高電位,B端為低電位,因此A點通過R1對C1充電,直至M點的電位等于參考電壓Uf時,比較器A1產生一脈沖,觸發器翻轉,則A點呈低電位,B點呈高電位。此時M點電位經二級管D1迅速放電至零,而同時B點的高電位經R2向C2充電,當N點電位等于Uf時,比較器A2產生一脈沖,使觸發器又翻轉一次,則A點呈高電位,B點呈低電位,重復上述過程。如此周而復始,在雙穩(a)(b) 態觸發器的兩輸出端各自產生一寬度受C1、C2調制的方波脈沖。
當C1=C2時,線路上各點電壓波形如圖2(a)所示,A、B兩點間平均電壓為零。當C1≠C2時,C1和C2充放電時間常數不同,電壓波形如圖2(b)所示,A、B兩點間平均電壓不再是零。
輸出直流電壓USC由A、B兩點間電壓經低通濾波后獲得,等于A、B兩點間電壓平均值UAP和UBP之差。
![]()
式中U1——觸發器輸出高電平。

設充電電阻R1=R2=R,則得![]()

圖5 主程序 圖6 A/D轉換子程序
4 實驗結果
按上述傾角測量原理及電路,我們制作了實際傾角測量裝置,在實際轉角測試平臺上進行了測量實驗,圖7 為傾角實際測量曲線。其中,實線表示傾角傳感器從-90°逐漸增大到+90°時的測量曲線,虛線表示從剛才的+90°逐漸返回到-90°的測量曲線。從圖中可以看出,我們設計及制作的傾角傳感器能夠實現-90°-+90°之間的傾角測量,且具有較好的線性度,但測量存在一定的回差,這主要是由于傳感器中介質的性能造成的。而且,若介質對溫度變化敏感,則傳感器的測量精度也要隨之受溫度影響。下一步的工作將尋求穩定的電容介質,提高傳感器的測量精度。
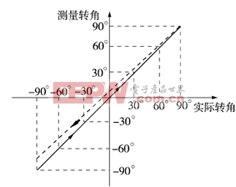
圖7 傾角實際測量曲線
參考文獻:
[1] 竇振中.PIC系列單片機原理和程序設計[M].北京:北京航空航天大學出版社,2000.
[2] 王有緒.PIC系列單片機接口技術與應用系統設計[M].北京:北京航空航天大學出版社,2001.
[3] 何信龍,李雪銀.PIC16C7X入門與應用范例[M].北京:清華大學出版社,2002.
[4] 彭樹生.PIC單片機原理及應用[M].北京:機械工業出版社,2002.
[5] 王化祥,張淑英.傳感器原理及應用[M].天津:天津大學出版社,1997













評論