基于模糊控制的閥門定位器設計

2 軟件設計
定位器利用閉環控制原理,將從調節器來的調節信號或直接的控制信號與從執行器來的閥門位置反饋信號相比較,根據比較后的偏差使調節閥執行機構動作,從而使閥芯準確定位,達到定位的目的。其離散PID算法的一般形式是:
Kp,KI,KD分別表示比例系數、積分系數、微分系數。新型采用模糊自適應整定PID算法原理如圖4所示。本文引用地址:http://www.j9360.com/article/161878.htm
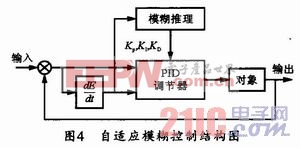
自適應模糊PID控制器以誤差E和誤差變化EC作為輸入,可以滿足不同時刻的E和EC對PID參數自整定的要求。
PID參數的整定必須考慮到在不同時刻三個參數的作用,總結工程設計人員的技術知識和實際的操作經驗,就能建立針對Kp,KI,KD三個參數分別整定的模糊控制表,表1所列為Kp的模糊規則表。

模糊控制規則表建立好后,可根據如下方法進行Kp,KI,KD的自適應校正。將系統誤差E和誤差變化率EC變化范圍定義為模糊集上的論域。
![]()
其模糊子集為:
![]()
設E,EC和Kp,KI,KD隸屬度函數為三角形函數,因此可以得出各模糊子集的隸屬度,根據各模糊子集的隸屬度賦值表和各參數的模糊控制規則表,就可以得到各個模糊規則下的模糊關系。進而求得Kp,KI,KD的模糊子集。
















評論