一種全自主足球機器人體系結構的設計和實現

足球運動是一種大家非常喜愛的運動。讓機器人去踢足球,聽起來像天方夜譚似的。機器人也能去踢足球? 而且,還是要組成一個隊伍,不同的機器人要互相配合?要知道,機器人要參加比賽必須要有自己的眼睛,自己的雙腿,自己的大腦,還得有自己的嘴--把自己的想法告訴別人,協同進行比賽。現在的足球機器人還沒有做到像我們人一樣。據科學家估計,這得再過五十年,即2050年左右才能做到在一個真的足球場地上,與我們人的比賽規則一樣的條件下進行比賽。到那時可能電視轉播的體育節目中機器人足球會占很大的比重。當然,這是猜測,目前為止,現實中在國際上最具影響力的機器人足球賽事組織有FIRA國際機器人足球聯合會和ROBOTCUP國際機器人足球世界杯賽。
本文引用地址:http://www.j9360.com/article/161872.htm舉辦機器人世界杯足球賽的目的是為了促進分布式人工智能研究的發展。通過提供一個標準任務,使研究人員能夠利用各種技術獲得更好的解決方案,從而有效促進各領域的發展。研究中涉及的領域有:智能機器人系統、多智能體系統、實時模式識別與行為系統、智能體結構設計、實時規劃和推理、基于網絡的三維圖形交互、傳感器技術等。
足球機器人比賽雖然剛剛開展幾年時間,但是它吸引了越來越多人的關注。因為它以喜聞樂見的方式走進了我們的視野,雖然它的體積很小,但是它的意義非常重大。它是綜合了計算機技術,自動化技術,機電一體化技術,人工智能技術,模式識別技術的一門綜合技術。足球機器人的核心技術是人工智能技術,它的目地是使機器具有人的智慧。它能使機器具有像人一樣的感知環境,向環境學習的能力。人工智能包括智能控制、機器感知、機器情感、專家系統、人工生命、神經元網絡和遺傳算法等等。本文提出了一個全自主足球機器人的體系結構。以各種傳感器模擬人的五官,以嵌入式計算機模擬人的頭腦,以雙輪和踢球器模擬人的四肢,以無限網絡通信模擬多人踢球,用信息溝通實現配合,再加上控制軟件就可以實現踢球所需的各種功能。
1 硬件體系結構
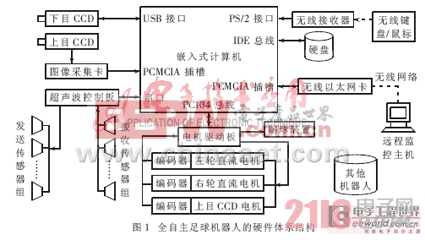
全自主足球機器人的硬件體系結構由六部分組成,即嵌入式計算機、視覺系統、超聲波定位避障系統、無線通信系統、運動系統和電源系統。機器人的核心是嵌入式計算機,負責視覺信息處理、機器人定位與導航以及行為決策,相當于機器人的大腦。而視覺系統則相當于機器人的眼睛,負責實時地提供環境信息,使決策模塊能夠針對賽場上的動態環境迅速做出反應。超聲波定位避障系統可以讓機器人避開前方的障礙物,并能算出距前方障礙物或邊墻的距離。運動系統負責驅動機器人本體移動、攝像機的旋轉和踢球裝置的運轉。無線通信系統是多機器人合作及軟件系統開發的基礎。電源系統采用直流充電電池,為以上所有部件提供電能。機器人車體采用鋁合金材料,極大地減輕了機器人的重量。足球機器人的硬件體系結構如圖1所示。










評論