基于CAN總線的電氣火災預警系統設計與實現

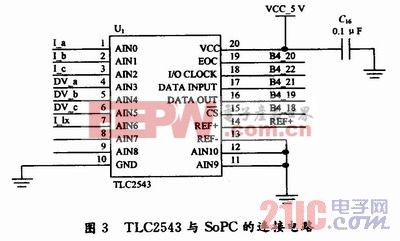
在本系統中,采集的各參數數據的準確程度和實時性將會對火災預測和判斷產生嚴重影響,甚至產生誤報、漏報,因此互感器及信號調理電路、模數轉換電路的設計和選擇甚為關鍵,這里選用高速的A/D轉換電路TLC2543,可滿足對電流、電壓和漏電流等參數的采集要求,其與SoPC的連接電路如圖3所示。本文引用地址:http://www.j9360.com/article/161791.htm
傳統的CAN總線節點之間通信的控制方式有2種,一種是利用單片機控制獨立的CAN總線控制器;另一種是用帶有CAN總線控制器的單片機進行控制。這2種方式都存在線路復雜,系統穩定性不高以及無法實時處理大理數據信息的弱點。本系統采用SoPC技術對CAN總線通信進行控制,可編程片上系統(System on a Programmable Chip,SoPC)技術是由Altera公司提出的一種靈活、高效的片上系統(Systemon a Chip,SOC)解決方案,是一種特殊的嵌入式系統。本系統中用嵌入式軟核NiosⅡ作為控制器,以MieroChip公司的MCP2515作為CAN總線控制器。
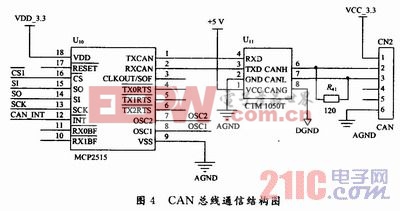
以往的CAN總線收發器,通常采用2個高速光耦(如6N137),以實現電氣隔離和電源上的DC—DC隔離,從而提高CAN總線通信的抗干擾性,另外還需要對阻抗進行調節、匹配才能搭出合理的電路,本系統采用廣州周立功公司的CTM1050T。模塊作為CAN總線收發裝置。它是一款帶隔離的高速CAN收發器芯片,該芯片內部集成了所有必需的CAN隔離與收發器件,能直接與CAN總線控制器的TXD,RXD引腳相連,具體電路連接如圖4所示。
系統采用這種拓撲結構,最大的好處在于降低了系統線路的復雜程度,同時提高了系統的穩定性,并在一定程度上降低了功耗和生產成本。
2.2 軟件設計中的關鍵問題
本系統軟件設計主要包括2個方面,一是系統對于電氣火災的預測與預報的算法實現;二是上位機監控軟件的設計和下位機功能軟件的實現。
設計本系統主要是為了解決傳統火災預警系統中的誤報、漏報率高的問題,實驗測試表明,火災探測器一段時間內的各采集的量值相互獨立,呈一種相關隨機分布,火災探測信號是非平移隨機過程,因此本文對探測器的量測判斷提出一種新的決策方法,即模式分類判別方法,火災探測器在臨界點附近的傳感器的量值判斷,對應著實際情況就是2類分類的問題,第一類是線路一般故障,不會引發火災;第二類是線路存在嚴重故障,有發生火災的可能性,一般在臨界點(閾值)范圍的傳感器在實際情況中會出現幾種情況:正常,報警,但是在這一臨界點上,出現這各種情況卻是一種隨機分布,也就是說在臨界點上是一種概率分布,當傳感器檢測到的值到了一定的范圍(一般取臨界點的一個范圍)內,為了減少漏報和誤報,在系統設計的過程中采用貝葉斯決策進行情況分類,于是問題轉化為對特定模式的決策分類問題。
上位機軟件主要是顯示目前系統的運行狀況和預測結果,下位機SoPC系統功能軟件中與CAN總線通信部分的軟件設計是整個系統軟件設計中較為關鍵的部分,SoPC系統中采用NiosⅡ為處理器,通過Avalon總線與定制的SPI核在FPGA芯片EP2C8Q208C8N中進行系統集成,這一過程可以通過QuartusⅡ軟件中的SoPC Builder工具完成,然后通過集成開發環境NiosⅡIDE對定制的SPI的IP核進行訪問與操作,待仿真驗證無誤后,利用ISP電纜線將程序燒寫至SoPC系統的配置芯片中,使CAN總線節點正常工作,上、下位機程序流程圖如圖5,圖6所示。











評論