基于負壓吸附的輪式玻窗清潔機器人

目前,市場上雖然出現了一些爬壁機器人,但至今還沒有一種專門針對玻窗清潔的機器人。本文介紹了一種基于負壓吸附的輪式玻窗清潔機器人,將其用于高層住宅的的玻璃清洗工作。使用該機器人可以避免玻窗清潔帶來的高空作業危險,而且其操作簡單、使用方便,應用價值高,市場前景廣闊。
本文引用地址:http://www.j9360.com/article/161461.htm1 玻窗清潔機器人系統總體結構
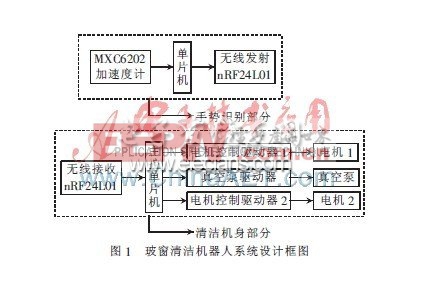
該玻窗清潔機器人系統由手勢識別和清潔機身兩個部分組成,如圖1所示。手勢識別部分利用MXC6202二軸加速度傳感器測量人手控制過程中的加速度值,將采集到的加速度值送入單片機中處理,經過一定的算法得到控制信號,并通過無線發射模塊發送到清潔機器人部分。清潔機身部分將接收到的手勢識別控制信號傳送給主控單片機[1],經過運算處理后,產生兩路直流減速電機的控制信號和一路微型真空泵的控制信號,經各驅動器放大后,實現對直流減速電機和微型真空泵的驅動和控制。
2 玻窗清潔機器人結構
玻窗清潔機器人采用負壓吸附、輪式驅動結構[2-3]。工作時,機器人吸附在玻璃面上,通過全方位移動,實現對玻璃的清潔。清潔機器人結構的三維實體模型如圖2所示,由車輪、過濾器、微型真空泵、同步齒形帶、直流減速電機、底盤、吸盤七部分構成。該結構系統簡單、可靠、操作方便,可以滿足壁面移動機器人在負載能力、速度以及可靠性方面的要求。
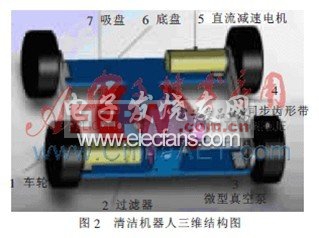
該機器工作原理:通過微型真空泵抽氣,在吸盤內形成負壓,從而將機器人吸附在玻璃面上;由兩個直流減速電機控制兩排輪胎的同向同速、同向差速、異向同速、異向差速等運動狀態,從而實現機器人上、下、左、右等運動。
3 玻窗清潔機器人驅動模塊
機器人驅動模塊是玻窗清潔機器人系統的關鍵部分,因此,本文重點介紹了驅動電機的選擇、電機的參數優化及驅動電路的設計。










評論