基于STM32的超聲相控陣導盲系統研究

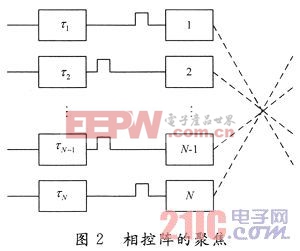
多個超聲換能器陣元按照一定的形狀、尺寸排列構成超聲換能器陣列。按維數可分為1維陣列和2維陣列,這里主要分析由相鄰間距為d的N個陣元組成的1維線陣。使用多個線陣按一定角度組合,調整各陣元的發射信號的相位延遲,可以有效地實現波束在空間中任意點的聚焦,從而實現對空間區域的探測,相控陣的聚焦如圖2所示。本文引用地址:http://www.j9360.com/article/161418.htm
3 超聲相控陣的相位延時及發射
相位延時是超聲相控陣技術的核心。為了實現超聲相控陣的聚焦、偏轉等功能,各個陣元應按照不同的相位來發射信號。現有的技術能將相位延時精度做到5ns以內。考慮到導盲對聚焦精度的要求不是太高,本設計采用STM32的定時器實現延時,也能夠滿足設計要求的精度。另一方面STM32芯片的價格也比較低,適于本項目對低成本產品的定位需求。
本設計采用的是TCF40-18TR1型傳感器。這是一款壓電陶瓷式收發同體超聲波傳感器。其中心頻率為40 kHz,發射聲壓在10 V。設計中采用軟件的方法產生頻率為40 kHz超聲信號。STM32F103RBT6包含1個高級定時器和3個通用定時器。通用定時器時鐘可由下列時鐘源提供:內部時鐘、外部時鐘、內部觸發輸入。此處采用APB1外設時鐘,頻率為36 MHz。可編程通用定時器的主要部分是一個16位計數器和與其相關的自動裝載寄存器。通用定時器包含4個獨立通道,每個通道都可用于輸入捕獲、輸出比較、PWM和單脈沖輸出模式。這里分別將通用定時器TIM2和TIM3的4個獨立通道設置成輸出比較模式,以產生40 kHz的方波信號。信號經GPIO口輸出到超聲波換能器放大,再由超聲波傳感器的探頭發出。
4 回波信號的接收部分
超聲信號經反射回到探頭位置,探頭接收到的回波信號一般在毫伏量級。先經過兩級的比例放大將信號幅度放大到幾百毫伏。比例放大采用的是美國TexasInstruments公司的OPA2725運算放大器,OPA2725具有兩個通道,支持單電源供電,軌到軌輸出,具有20 MHz的增益帶寬。本設計中比例放大由兩級運放組成。將收到的回波信號加到同相端和地之間,在反相輸入端引入電壓負反饋。
信號經比例放大后幅度增大至幾百毫伏,此時的信號已經夾雜一定的高頻噪聲,由于回波信號中的有用信號都集中在40 kHz左右這一頻段,所以選用低通濾波電路濾除高頻干擾信號。為了得到完整的障礙物信息,低通濾波電路的截止頻率即為超聲波信號的頻率的5倍即200 kHz。低通濾波后的信號再經過一級時間增益(TGC)放大之后進行A/D轉換,并存入單片機的存儲器中,以進行相關的信號分析。
5 回波信號處理與分析
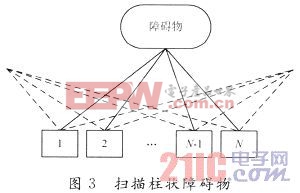
對應不同的障礙物和地形,系統收到回波的波形和時間都會有區別。根據這2個條件可以實現對障礙物和地形的判斷。這里用到1個由N個探頭組成的線陣。探頭分別編號為1,2,…,N-1,N。當遇到如圖3所示障礙物時,相控陣在中間的焦點碰到障礙物接收到的回波,應該是N路聲波在焦點處的疊加;而在左右兩邊聚焦點處由于沒有碰到障礙物,所以不會有疊加后的波形返回。以上2種情況收到的波形分別如圖4和圖5所示。如果碰到溝壑類的障礙物時,如圖6所示,這里假設編號N-1探頭接收回波信號,當人走到a處時,相控陣聚焦在c點,此時焦點到探頭N-1的距離為l,則超聲波從探頭N-1發射到聚焦點返回探頭的時間為t=2l/c,c為空氣中超聲波的速度。當人走到b點時,相控陣聚焦在d點,這時在d處不會有聚焦后的波形返回,只能是各路超聲波在溝壑底面發生反射。仍以編號N-1探頭為例,從發射到接收到回波的時間應為t’=![]() ,△l為聚焦點到到溝壑的長度。從上面的分析可以看出,當相控陣的位置從a移動到b,系統收到的回波波形以及接收到波形的時間均發生了明顯變化,從而為判斷地形提供了可靠依據。
,△l為聚焦點到到溝壑的長度。從上面的分析可以看出,當相控陣的位置從a移動到b,系統收到的回波波形以及接收到波形的時間均發生了明顯變化,從而為判斷地形提供了可靠依據。










評論