無電網電壓傳感器三電平PWM整流器研究

在估計磁鏈時采用純積分環節,積分初值問題將會造成觀測磁鏈的偏差,從而影響電流反饋的真實性和電壓空間矢量施加的準確性。因此在計算虛擬磁鏈時,采用三個一階低通濾波器代替純積分環節,以消除積分直流偏置影響,虛擬磁鏈觀測器原理如圖4所示。本文引用地址:http://www.j9360.com/article/161032.htm

5 三電平PWM整流器控制系統
此處采用基于電網虛擬磁鏈定向矢量控制策略,輔以整流器前饋解耦,采取電壓外環、電流內環的雙閉環控制,并利用兩相電流和橋臂開關信號估計出虛擬磁鏈矢量位置角θ,據此進行坐標變換,實現無電網電壓傳感器的矢量控制,圖5示出控制框圖。系統控制目標為:維持直流母線電壓恒定且有良好的動態響應,確保網側輸入電流正弦,功率因數為1。
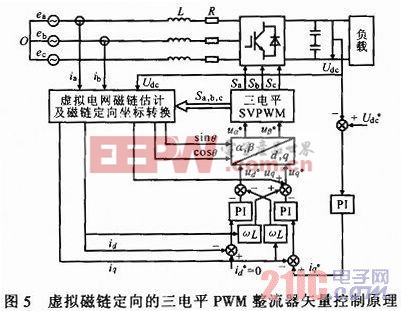
在控制系統中,由于磁鏈定向角滯后電壓定向角π/2,所以q軸電流分量iq為有功電流,d軸電流分量id為無功電流;外環為直流電壓閉環,輸出有功電流給定![]() ,在功率因數為1的要求下,令d軸電流給定
,在功率因數為1的要求下,令d軸電流給定![]() 分別與對應的反饋值id,iq比較后,經PI調節與前饋解耦補償后,即可獲得交流側的指令電壓
分別與對應的反饋值id,iq比較后,經PI調節與前饋解耦補償后,即可獲得交流側的指令電壓![]() ,由此再經α,β坐標變換后進行SVPWM,產生驅動信號實現對網側三電平整流器的控制。
,由此再經α,β坐標變換后進行SVPWM,產生驅動信號實現對網側三電平整流器的控制。

pwm相關文章:pwm原理











評論