無電網電壓傳感器三電平PWM整流器研究

3 簡化三電平SVPWM算法
此處對三電平整流器采用新穎的SVPWM簡化控制算法,該方法是將三電平空間矢量圖分解為6個相互重疊的小六邊形(用S=1~6標志),如圖2a所示:每個小六邊形即代表傳統的二電平空間矢量圖,再利用兩電平算法進行實現,這對三電平而言更加簡單方便。本文引用地址:http://www.j9360.com/article/161032.htm
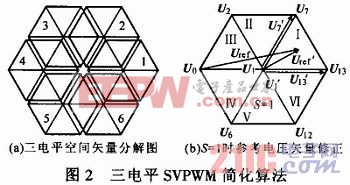
在三電平向兩電平平面過渡時,需對參考電壓矢量進行修正。圖2b為S=1時的參考電壓矢量修正示意圖。Uref為原參考電壓矢量,按照最近三矢量法則,該參考矢量可由電壓矢量U1,U13,U7共同合成。各矢量減去小六邊形原點U1后,參考矢量和相鄰矢量轉化到該小六邊形三角形區域內,其中![]() 分別為Uref,U1,U13,U7修正后的兩電平中電壓矢量,以U1為原點,且U1’為零矢量。通過轉化后,三電平SVPWM算法即可采用常規的二電平SVPWM算法實現。
分別為Uref,U1,U13,U7修正后的兩電平中電壓矢量,以U1為原點,且U1’為零矢量。通過轉化后,三電平SVPWM算法即可采用常規的二電平SVPWM算法實現。
針對三電平整流器中點電位波動的問題,此處采用基于檢測直流側電容電壓改變小矢量作用時間的方法來抑制中點電位波動。即結合整流器運行狀態,在獲得中點電位偏差的情況下,針對偏差的不同情況,動態改變正、反組小矢量的作用時間即可對中點電位波動進行抑制。
4 虛擬電網磁鏈位置角的觀測
準確觀測虛擬電網磁鏈矢量的位置角θ是三電平PWM整流器虛擬電網磁鏈定向無電壓傳感器控制的關鍵。可根據三電平PWM整流器在α,β坐標系中的電壓平衡方程,通過對網側電壓積分即可估計出電網虛擬磁鏈:
![]()
式中:um為整流器交流側輸出三相電壓α,β分量;ψm為電網虛擬磁鏈的α,β分量。
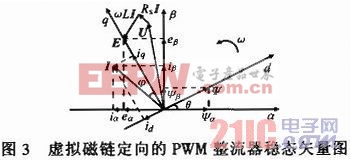
令![]() ,按虛擬磁鏈定向時,定向角可為θ=tan-1(ψβ/ψα),據此進行坐標變換,得到d軸虛擬磁鏈定向的同步旋轉坐標系統,從而實現無電網電壓傳感器的矢量控制,其坐標變換關系如圖3所示。
,按虛擬磁鏈定向時,定向角可為θ=tan-1(ψβ/ψα),據此進行坐標變換,得到d軸虛擬磁鏈定向的同步旋轉坐標系統,從而實現無電網電壓傳感器的矢量控制,其坐標變換關系如圖3所示。

pwm相關文章:pwm原理











評論