基于STM32F107的搬運機器人電機控制系統設計

摘要:針對搬運機器人的前輪轉向舵機和后輪驅動電機的控制要求,采用以Cortex-M3為內核的STM32F107作為主控制器,采用嵌入實時操作系統μC/OS-II,將程序分成啟動任務、電機轉速控制任務、舵機控制任務等相對獨立的多個任務,并設定了各任務的優先級。該系統能較好地實現搬運機器人的運動控制。
關鍵詞:搬運機器人;STM32F107;運動控制;μC/OS-II;任務調度
引言
隨著人工成本的不斷升高,用機器人代替人力去做一些重復性的高強度的勞動是現代機器人研究的一個重要方向。搬運機器人在導航尋跡中,需要后輪驅動電機和前輪舵機的協調工作。搬運機器人電機驅動有其特殊的應用要求,對電機的動態性能要求較高,能在任意時刻到達控制需要的指定位置并且使舵機停止在任意角度;電機驅動的轉矩變化范圍大,既有空載平整路面行使的高速度、低轉矩工作環境,也有滿負載爬坡的運行工況,同時還要求保持較高的運行效率。根據以上的技術要求,本文選用了控制技術成熟,易于平滑調速的直流電機作為搬運機器人的執行饑構。
1 系統的硬件設計
1.1 機器人電機控制器硬件結構
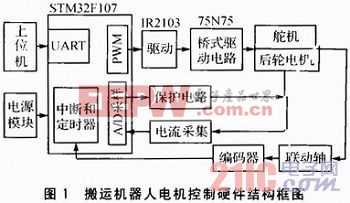
主控制器采用Cortex-M3內核的STM32F107。控制器內部共有8個定時器,其中TIM1_CH1和TIM8_CH1為高級控制定時器引腳,TIM1_CH1用于電機編碼器計數。TLM8_CH1用于舵機控制基準時間。通用定時器引腳TIM2 CH1、TIM3 CH1、TIM4_CH1、TIM5_CH1分別用于電機和舵機驅動電路上下橋壁PWM的產生。
觸發EXIT0中斷的PA0口和PB0口分別用于電機和舵機的過流中斷保護。觸發EXIT1中斷的PA1口和PB1口用于舵機兩側限位保護。電機驅動電路采用自舉升壓芯片IR2103和MOSFET管75N75,后輪電機和舵機的相電流采集是通過康銅絲轉換成電壓,通過放大濾波處理,分別送至STM3 2F107的A/D采樣引腳ADC12_IN1實現過電流保護。通過上位機串口通信或STM32F107內部程序速度給定,控制電機的正反轉、速度及舵機的轉向。搬運機器人電機控制硬件結構框圖如圖1所示。












評論