超聲波的移動機器人導航的設計原理

1 引言
本文引用地址:http://www.j9360.com/article/160615.htm在項目開發中采用從英國進口的SRF05 超聲波傳感器,它的回波反饋與測距方式與通常使用的超聲波傳感器相比較特別, 在ARM中實現也稍有難度, 但該傳感器精度很高可達到1cm, 因此用該傳感器去掉了用于近距離測距的紅外測距模塊節約了硬件資源。
該機器人的最小系統為,觸摸屏模塊,超聲波模塊,攝像頭圖像采集模塊,直流電機閉環控制系統,在整個系統中測距是最總要的一環,它直接影響電機運行距離的精度,在有效范圍內的圖像采集控制。整個系統都是在ARM9 與linux 平臺中完成,每個模塊都是用設備驅動的方式實現使得模塊的控制更加方便。
2 SRF05 超聲波測距方法
提供一個10us 的脈沖觸發超聲波傳感器,SRF05 會發出8 個周期的頻率為40khz 的超頻脈沖,此時在echo 也是就回波口上的電平變為高,此時定時器開始計時,等到echo 變為低電平證明有障礙物此時停止計時,高脈沖的寬度有測距的距離成正比,該超聲波的有效測距范圍為1cm~4m, 因此如果沒有障礙物或障礙物大于4m,echo 依然會變為低電平此時定時器的時間為30ms, 因此在測距時定時器的周期應大于30ms 這樣才能有效測距。
原理如圖1 所示。

3 超聲波測距軟件實現
如圖2 為超聲波測距的流程圖。
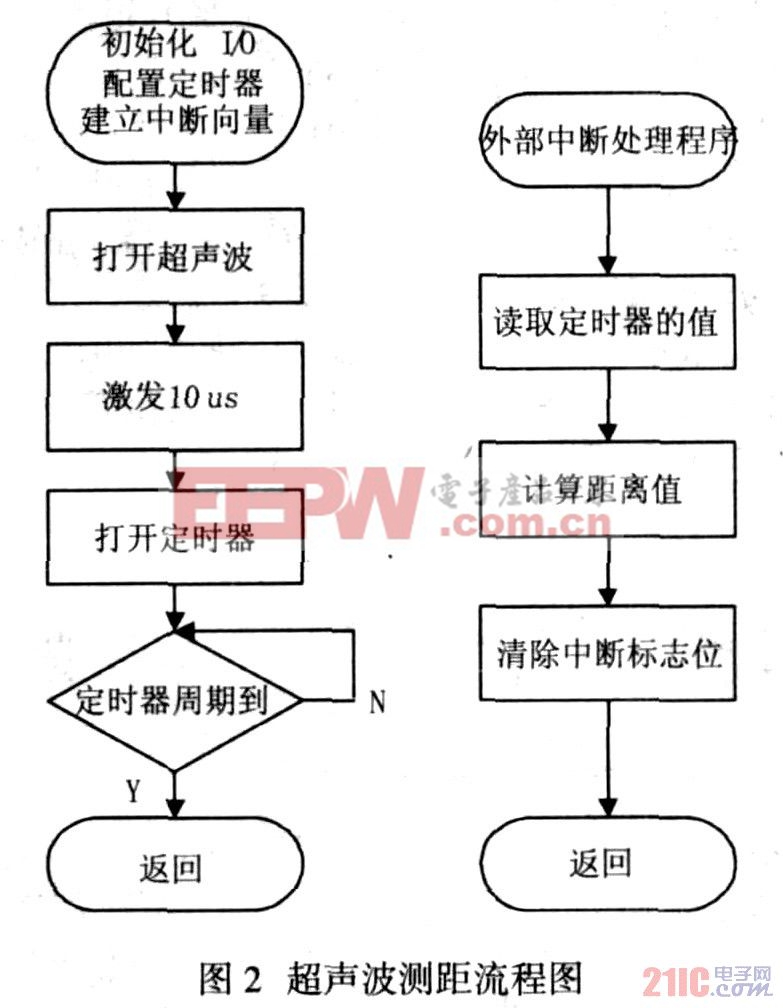
3.1 回波檢測的采集方法
超聲波的回波的檢測是個難點, 因為在ARM中一個端口設置中斷只能設置一種觸發方式, 如果設為上升沿觸發可以打開定時器定時但無法捕獲下降沿,也就無法關閉定時器,從而不能測距, 因此用軟件的方式實現。首先設置兩個時間延遲函數usdelay()和msdelay(),這樣可以在給出高脈沖10us 后等超聲波觸發再打開定時期計時,在設置一個外部中斷eint1 接到超聲波傳感器的echo 口并設置為下降沿觸發,等下降沿來臨關閉定時器讀出值既為脈寬的時間長度,然后根據障礙物的距離=(ECHO高電平的時間)* 聲納速度/2 得出距離。空氣中v 與溫度關系:v=331.5√1+T/273 m/s,T 為攝氏溫度。一般情況下超聲波速近似聲速,在室內溫度影響下取約343.2m/s.











評論