如何控制驅動VR

為減小導通損耗及反向恢復損耗,同步整流需要精確的時間控制電路,雖然已有幾種方法來產生控制信號,我們現在采用一種從反饋系統來有源控制的柵驅動信號的定時系統。其關鍵優點在于該電路將根據元件狀態的變化來特別調節同步整流MOSFET中的不可控的電容。時間的延遲及溫度變化對MOSFET閾值的影響都可以根據反饋環來校正。
本文引用地址:http://www.j9360.com/article/160610.htm為控制柵軀動的時間,在圖1中使用了可調延遲的電路,該延時電路包含三個主要元件,一個延遲線,一個乘法器及一個邏輯與門電路。到延遲線的輸入信號是相對每個延遲元件都延遲幾個納秒的信號。為了產生控制導通的延遲,乘法器選擇了使輸出信號延遲的元件,最后與門確定延遲加到驅動導通的上升沿。從IN到OUT的延遲控制由數字控制總線來執行,數字總線加到乘法器的地址輸入上。相反地,如果控制總線設置全部為0,則從IN到OUT的延遲就為0,即沒有延遲。幾種不同的延遲時間可以設定,給出幾種開啟延遲時間,關閉延遲時間,或對稱的開啟及關斷延遲。注意看圖1中是一個電壓檢測電路及數字控制器,為執行不同的延時設置,會用不同的電壓檢測電路及數字控制器。
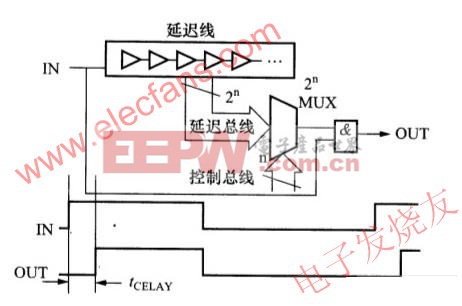
圖1 可調延遲電路
控制驅動電路的設計從回流的MOSFET VR開始。隨著其源漏電壓降到零,它將立即被關斷。一種實現它的簡單方法就是用比較器檢測VR的源漏電壓過零時間,用這種方法的問題在于通過比較器,邏輯電路及柵驅動的延遲會產生出來,這要給予考慮。即使非常快的電路,延遲總量也會有50ns或更多。此期間體二極管會導通,并增加大的導通損耗,從檢測降落的源漏電壓到MOSFET導通時,一個邏輯回應的固有時間延遲可以用從最后一個開關周期得到的信息處理,去預置下一次的MOSFET的導通。在此預期方法中,MOSFET的柵壓開始在其源漏電壓降落之前就增加。此期間讓柵壓提前動作,在源漏電壓降下時其即導通,而體二極管決不會導通。
圖2展示出控制電路可實現VR的導通及關斷。它使用了兩個乘法器,兩個記數器,一個延遲線及控制MOSFET導通及延遲的膠合邏輯,因此消除了體二極管的導通。電路的描述從MOSFET的開啟延遲開始。PWM控制信號驅動初級側MOSFET Q1,同時加到延遲線。當電源第一次啟動,則LOAD輸入到記數器為高電平,它設置了開啟延遲的計數器為全部是1(高電平),而設置了關斷延遲計數器全部為零(低電平),隨著計數器開始記數,從控制電路的輸出到柵驅動的結果之間為最大的導通延遲及最小的關斷延遲。

圖2 VR的控制電路
隨著延遲設置了這些數值,VR體二極管將會導通,反饋環路也將開始調節延遲,使之實現最小的體二極管導通,圖3(a)和(b)展示出VR在導通期間的柵源和漏源電壓,圖3(a)展示在VR導通時延遲太長的電路,而圖3(b)展示出最佳延遲時間。
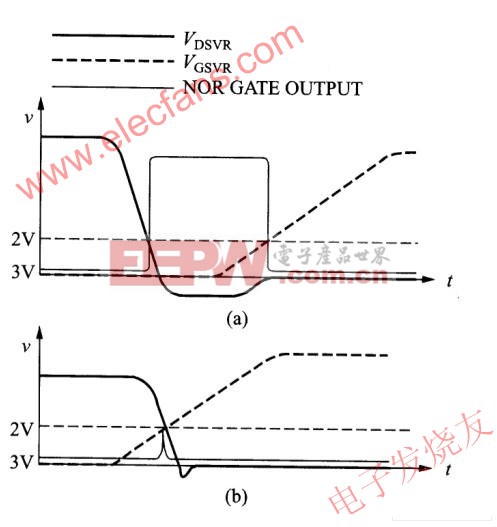
圖3 VR的開啟波形









評論