基于人臉形狀特征的精確定位解析方案

1研究背景
本文引用地址:http://www.j9360.com/article/160599.htm生物識別技術是目前最為方便與安全的識別系統。生物識別是依靠人體的身體特征來進行身份驗證的一種解決方案。由于與傳統的生物識別技術相比,人臉識別因具有更為簡便、準確、經濟及可擴展性良好等眾多優勢而普遍為人們所看好,被廣泛應用于安全驗證、監控、控制等各個方面。但到目前為止,能夠滿足人們需求的理想系統尚未出現[1]。
根據FERET’97 測試報告[2],目前的人臉識別算法對于不同的攝像機、不同的光照條件和年齡變化的適應能力非常差。FRVT’2000評測[3]結果表明,人臉識別系統的性能與FERET’97的測試相比有了一定的進步,但其識別性能對各種條件,如光照、老化、距離、姿態等,仍然離人們的期望值較遠。
2問題的提出
本文僅考慮單人正面靜態灰度圖像,著重考慮人臉圖像的檢測和定位,不考慮頭部的俯仰、旋轉以及穿戴、遮蔽的情況,而且頭部的傾斜不超過15°。
本文的研究工作主要是提出了結合人臉模板和人臉特征進行人臉檢測的方法,對現有的人臉檢測與定位的方法提出了改進,進而提取臉部特征,并在此基礎上實現了一個智能識別系統演示軟件。本文所采用的方法,主要是基于參數化的橢圓型人臉模板與基于眼睛及嘴巴幾何特征相結合的人臉定位方法,以及根據其眼睛、鼻部及嘴部的幾何特征參數,對實驗人臉庫進行監督下的分類和統計的人臉識別方法。所采用的人臉數據庫是BioID人臉庫。
人臉自動識別系統包括下列主要技術環節[4],首先是人臉檢測和定位,即從輸入圖像中找到人臉及人臉存在的位置,并將人臉從背景中分割出來,然后才是對歸一化的人臉圖像進行特征提取與識別。這兩個環節的研究獨立性很強。由于在很多特定情況下,人臉檢測與定位的工作比較簡單,因此“特征提取與識別”環節得到了更為廣泛和深入的研究;而近幾年來隨著人們越來越關心各種復雜情形下的人臉自動識別系統,人臉檢測與定位才得到了較多的重視。
評價一個人臉自動識別系統的標準,一個是誤識率即將某人錯識別為其他人,另一個是虛警率即將其他人識別為這個人。這二者之間是存在矛盾的,所以在實際問題中往往需要進行某種折衷。這一點同樣適用于特征提取與識別環節,但是對于人臉檢測與定位,我們一般則要求誤識率要盡可能低,因為這樣才可以保證所要識別的人不會在這一步就丟失。
常用的人臉識別實驗庫以美國軍方的FERET 庫最為權威。另外如MIT、ORL 等庫也可以用來驗證算法在某些方面的能力。目前尚沒有專門測試人臉檢測和定位算法的圖像庫。
4.1 人臉特征的檢測
特征檢測是人臉識別智能系統中的關鍵環節,因為眼睛、鼻子和嘴巴等特征集中了人臉的人部分信息。對于人臉建模來說,不僅要檢測出這些特征,而且要準確地加以定位。
假設人臉的姿態比較正,那么人臉上的特征是水平邊緣集中的區域。我們可以在低分辨率下提取水平邊緣,然后找到人臉區域內富含這些邊緣的連通區,作為人臉特征的候選區域。這些區域的位置和大小并不準確,因為邊緣檢測本身容易出現位置偏移,連通區的大小也隨閾值而變化。所以還需要進一步修正上面的結果。對正面的人臉來說,眼睛、嘴巴等特征和整個人臉的尺寸之間存在先驗的約束關系,這就是人臉結構的恒常性,因此我們利用這些約束關系確定特征區域的大小。
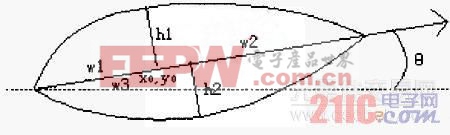
圖1 眼睛輪廓模型
評價函數的選擇是關鍵。眼睛本身不具有—致的顏色信息,而邊緣信息比較豐富。因此,先對圖像進行邊緣提取,然后作適當尺度的閉運算,就可以使眼睛內部形成單一的高亮度區。在處理過的圖像中,眼睛內部是高亮度區,外部是低亮度區。因此可以定義評價函數如式(1)所示。其中D表示眼睛區域, 表示眼睛輪廓之外的帶狀區域, 表示輪廓之內的帶狀區域。根據4段曲線表達式得到的眼睛區域可以初始化眼睛的輪廓,然后用最陡下降法迭代直至該輪廓收斂。
![]() (1)
(1)
嘴巴輪廓的模型如圖2所示。由兩段四次曲線組成,曲線的參數有7個:嘴巴的中心(x0,y0)、連接兩嘴角的直線傾角θ、上下半嘴的高度h1和h2、嘴角到嘴巴中心的距離w,以及上下半嘴的四次項系數q1和q2。

圖2 嘴巴輪廓的模型
嘴巴的評價函數比較容易確定,可以通過唇色和膚色的分割將嘴巴區分出來。評價函數的表達式如式(2)所示。各符號的含義與眼睛模型相似。









評論