擬人機器人上肢多關節控制參數整定

摘要:為了得到擬人機器人上肢關節控制電機的精確參數,通過建立直流電機的物理和數學模型,利用Matlab軟件建模和仿真,找到了一個合適的PID控制方法,通過調節KP,KI,KD參數,系統獲得了較高的控制精度和響應速度,幾乎能夠完全抵抗外部干擾,該仿真對擬人機器人手部控制節點的設計具有很重要的指導作用,對于一般的直流電機閉環控制也有一定的借鑒意義。
本文引用地址:http://www.j9360.com/article/160569.htm0 引言
擬人機器人手部控制節點的任務是接收機器人“大腦”(即上位機)的指令,完成手部電機的速度及位置控制。擬人機器人手部電機采用DC電機,通常DC電機抗干擾能力有限。本文探索DC電機的PID閉環控制手段,為了得到較好的可能效果,需要尋找合適的控制參數:KP,KI,KD。文中首先對DC電機進行物理抽象,進而建立數學模型,并通過實驗手段得到實際電機的系統參數。最后通過模擬手段,實現擬人機器人手部電機開環控制系統及速度閉環PID控制系統的仿真,并通過調節KP,KI,KD獲得較好的抗干擾相應。通過仿真得到的控制參數可以反過來用于指導控制節點的設計。
1 DC電機建模
1.1 建立直流電機的物理模型
電機的物理模型如圖1所示。
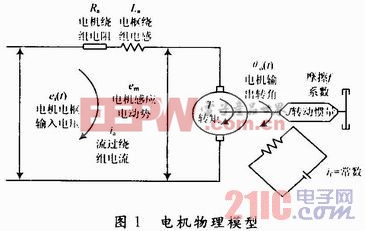
1.2 DC電機數學模型的建立
式(1)是理論分析得到的電機開環控制的數學模型。判斷一個模型是否適用于實際的擬人機器人手部DC電機,需要將實際測量電機的相應曲線和理論公式進行比較。
![]()
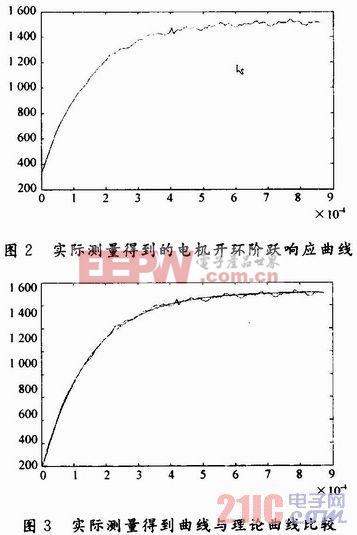
1.3 實際電機的開環階躍響應
為了確定上述電機模型的參數,同時驗證上述電機模型的正確性,首先對電機進行開環階躍響應實驗,給定電機一個目標速度設定,測出電機速度隨時間的變化曲線。擬人機器人手部電機裝有16線編碼盤,給電機加上128/256的PWM站空比(相當于2.5 V電壓,PWM站空比與e1成線性關系),利用單片機的寄存器,通過編寫一定的程序測得一組電機每轉過π/8對應的時間值,為了處理實際測量得到的數據,使用VC編寫一個數據處理程序,在Matlab中運行由VC程序自動生成的.m文件,就可以繪出擬人機器人手部DC電機的響應曲線。在Matlab中運行該文件就可以得到電機的響應曲線,如圖2所示。












評論