基于航跡推算的移動式機器人定位系統設計

2.2 光電編碼器電路
光電編碼器是一種通過光電轉換將輸出軸上的機械幾何位移量轉換成脈沖或數字量的傳感器,由光柵盤和光電檢測裝置組成。光柵盤是在一定直徑的圓板上等分的開通若干個長方形孔,開孔的數量決定了控制的精度。機器人運動時,光柵盤隨電機旋轉,經發光二極管等電子元件組成的檢測裝置檢測并輸出若干脈沖信號,通過采集脈沖個數后運算即可得出機器人運動路徑長度。本文引用地址:http://www.j9360.com/article/160341.htm
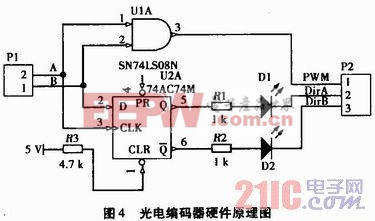
如圖4所示為光電編碼器的外圍采樣電路,主要是通過一個與門和一個D觸發器來實現對脈沖信號的采集。一般的光電編碼器是由A、B、Z三路信號組成,A和B是兩個前后相位差為90°的脈沖信號,根據光柵盤的旋轉方向,相位差的超前與滯后各不同,因此利用與門將A、B信號整合成一個脈沖信號再利用D觸發器判斷A、B兩者相位差關系。當光柵盤正轉時,A超前B 90°,D2發光,同時在DirB處檢測到高電平。當光柵盤反轉時,A滯后B90°,D1發光,且在DirA處檢測到低電平,再通過單片機的處理就能準確判斷光柵盤所轉過的柵格數,從而計算出機器人運動路徑的長度。
![]()
式中,P1表示正轉PWM脈沖個數,P2表示反轉PWM脈沖個數,n表示編碼盤柵格數,r表示機器人動力輪半徑。
2.3 陀螺儀硬件電路
設計中采用三軸陀螺儀對加速度進行測量,積分后即可得到所需的角度偏移量,如圖5所示為陀螺儀硬件原理圖。其工作原理為中央處理單元發送通信數據給陀螺儀使之工作,陀螺儀在機器人發生角度偏移時測量實際偏移量和理論偏移量的差值,將該值傳送給中央處理單元,由中央處理單元計算出補償值后發指令給伺服器,使電機進行誤差補償。
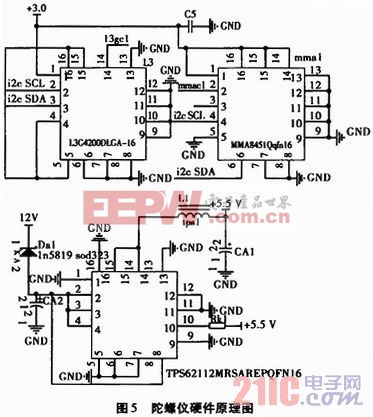
圖5中L3G4200D是一個三軸陀螺儀,可以對x、y、z三個方向的角度進行檢測,檢測后的數據通過ISP通信傳送將端口SCL、SDA角度信號傳輸給中央處理單元。MMA8451Q是一個速度計,可以實時檢測機器人的運行速度,并用相同方式將運行速度信號傳輸給中央處理單元。之所以在此安裝速度計,是為了降低中央處理單元中CPU的計算量,讓CPU有更多的空間去處理速度與路徑的關系。TPS62112是低噪音的同步降壓DC—DC轉換器,其內部集成了N型和P型MOSFET,可進行同步整流,為陀螺儀芯片提供良好的電源環境。











評論