BOA技術在車輛感知網絡中的應用研究

摘要:“車聯網技術”的興起,大量傳感技術得到應用,受無線傳輸設備與傳感器體積限制,信息只能單向傳遞,缺少與被感知設備間交互。提出一種通過BOA技術遠程感知交通設備中部件訪問的雙向交互技術,配合虛擬獨立地址技術可以達到部件分組獨立控制。這樣BOA通過CAN總線集成可以對設備整體進行全部部件監控和更多的優化操作,達到更大范圍內的遠程參數獲取與監控。最后,通過具有BOA技術的實例證明,此種技術可行。
關鍵詞:智能交通;車聯網技術;BOA;遠程交互
車輛感知是支持車聯網技術(Internet of Vehicle,IoV)的主要技術內容之一,在文獻中車聯網技術被定義為:指利用先進傳感器技術、網絡技術、計算技術、控制技術、智能技術,對道路和交通進行全面感知,實現多個系統間大范圍、大容量數據的交互,對每一個車輛、每一個道路的狀態進行多方面、全時段的控制,以提供交通安全及交通效率。從定義中可以看出“車聯網”技術本質就是無處不在的感知,這樣感知過程需要有效的傳感器及雙向信息交互。車聯網的研究關注的重點在于車-車、車-路的宏觀通訊技術,以及車輛自身的微觀狀態感知,大多數微小設備感知信息是單向傳遞,缺乏對部件的控制與操作回饋的雙向信息傳遞,故此需要完善,文中基于這個需求進行了研究。技術主要內容把嵌入式的BOA技術引入到車聯網技術當中。此方法可以通過與CAN(Controller Area Network)總線、控制中心的智能程序集成,達到集中監控與調整設備整體的關鍵部件參數,即智能部件感知的目的。甚至通過具有獨立的虛擬地址技術對關鍵部件設置獨有地址,達到遠程感知。對此,本文做了部分研究工作,首先,介紹了基于BOA的面向車聯網構架結構,其次,對關鍵技術GoAhead的Web Server遷移到VxWorks做詳細的介紹,最后,給出一個對車聯網中的關鍵部件進行管理的簡單例程。
1 “車聯網”與BOA技術
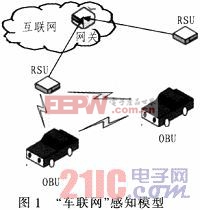
在車聯網系統中需要感知具體的關鍵部件的健康狀態,運行信息等。車聯網技術感知模型如圖1所示,車輛感知信息通過(OBU)與路邊設備(RSU)建立無線通信,經過網關接入互聯網。
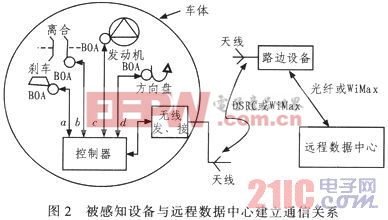
“車聯網”感知模型相比來說較為宏觀,如果微觀層面上需要在“車聯網”內部具有感知車輛內部設備的數據交互,達到被感知設備與管理系統或數據中心建立通信關系。借助BOA技術建立關系如圖2所示,達到雙向交互目的。










評論