基于多Agent的傳感器管理系統研究與設計

本文提出了一種傳感器管理系統框架,給出了基于多Agent的解決方案。該結構通過多個Agent間的相互協商來實現傳感器任務的分配,較好地克服了在融合中心存在的缺陷。并在此基礎上著重探討各Agent之間的協調合作問題,實現了基于KQML語言的各Agent之間的協調機制。
本文引用地址:http://www.j9360.com/article/159640.htm1 引 言
多傳感器系統能從不同的角度和視野獲取其觀測環境更多的全局信息,在軍事和民用領域正受到越來越廣泛的重視。為適應現代戰場變化,獲得最佳的作戰效果,許多研究人員開始把注意力放在對傳感器資源進行自動或半自動管理的研究上,充分發揮各個傳感器的效能。與此同時,隨著指揮自動化建設的不斷前進和更新,越來越多的遺留系統擺在研究人員的面前,如何合理利用這些遺留系統也是科研人員需要解決的一個問題。一個方案就是包裝遺留部件,為他們提供“Agent層次”的功能,使得它們可以和其它的軟件部件進行通信和合作。
2 傳感器管理現狀
傳感器管理的核心問題就是依據一定的最優準則,確定目標選擇何種傳感器以及該傳感器的工作方式及參數。傳感器管理系統(SMGS)的任務就是利用有限的傳感器資源,滿足對多個目標和掃描空間的要求,以得到各具體特性的最優度量值(檢測概率,截獲概率,傳感器自身的發射能力,航跡精度或丟失概率等),以最優準則對傳感器資源進行合理分配,選擇傳感器的工作方式和工作參數。目前的傳感器管理的結構則分為集中式和分布式。
2.1集中式管理結構
在集中式管理結構中,由融合中心向所有的傳感器發送其需要執行的任務和完成該任務的參數集或運行模式。其缺點是融合中心難以對各個傳感器的負載情況做出實時的*估,在多任務時會造成負載不均衡,甚至會造成個別傳感器嚴重過載而無法完成任務,另外,當傳感器數目增多時,融合中心的計算量會急劇上升,通訊量也會大大增加。
2.2分布式管理結構
在分布式管理結構中,將管理功能分布在系統的不同位置或不同傳感器中。其不足是信息冗余會帶來嚴重問題,此外,如果沒有一套公共的通訊設施,網絡中各節點之間的數據交換只能嚴格按端到端的方式進行,發送端與接收端之間的延時會產生網絡中不同部件的全局狀態出現瞬間的不一致,從而導致系統整體性能的下降。任務沖突和競爭使任務協調變得更加復雜。
Agent是來自于分布式人工智能的一個概念模型,通常是指具有目標、行為和知識,能在不確定性環境中,根據自身能力、狀態、資源、相關知識以及外部環境信息,通過規劃、推理和決策實現問題求解,并進行相應的活動,自主地完成特定任務并達到某一目標的實體。
多Agent系統(MAS)是一組為實現某一全局目標,通過通信網絡或計算機網絡相互連接起來的系統。其中的各Agent必須相互協商、協調和協作才能完成共同的任務,以實現全局目標。MAS以其適應環境的動態自組織能力和開放式的基礎結構而在許多領域受到重視。
3.1 系統構架及特點
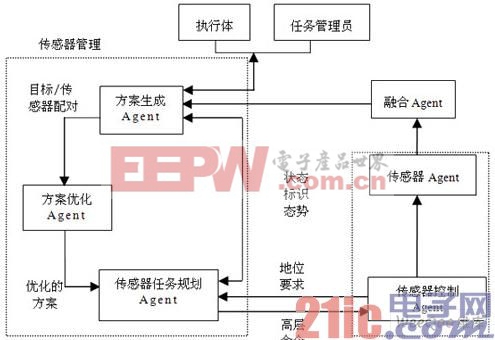
圖1 傳感器管理系統(SMGS)的任務流程與外部接口關系
⑴決策過程分布在網絡上的各節點中,這種策略允許發揮各傳感器節點自身的管理潛能(局部管理器對其自身的傳感器任務進行決策);
⑵全局系統任務管理器僅需對所屬傳感器提出任務要求,然后對系統任務的完成情況(性能指標)進行監控,不需對傳感器進行具體的管理;特別值得強調的是,由于傳感器Agent的設置,使傳感器具有高度的自主性及與設備無關性(傳感器與融合節點之間以及傳感器之間的信息交換可通過基于標準化的請求/響應查詢語言及情報數據鏈實現),這為傳感器的機動組網創造了有利條件;
⑶系統中的每個節點對應于一個物理實體或決策實體,它們之間通過消息進行協調,系統容易構造;
⑷采用基于多Agent的系統,決策者在模型系統上所作的決策能夠很快在實際運行中實現,易于實現;
⑸一般的模擬方法只能*估事先設定好的決策方案的效果,而不能建議產生新的方案,即只能回答“what-if”的問題,而不能回答“what’s best”,多Agent系統為回答“what’s best”問題提供了可能性。












評論