大功率永磁低速同步電機的無傳感器控制

2.2 轉子位置及速度估算
由d,q坐標系下得到的,并沒有包含轉子速度及位置信息。因此為得到所需信號,需考慮電機的電動勢在d,q坐標系下的特點進行轉速及位置估計。本文引用地址:http://www.j9360.com/article/159635.htm
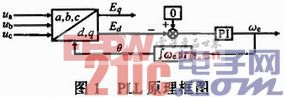
由于PLL是一種自適應閉環系統,故能實時跟蹤三相對稱電源的頻率與相位。在此根據PLL的特性及工作原理,設計了基于PLL的轉子位置/速度估計算法,其算法原理如圖1所示,其中PI調節器的參數可參考文獻設計。
3 實驗研究
將無傳感器控制算法用于2 MW PMSM控制實驗平臺。該平臺包含兆瓦級PMSM系統和變流器系統,其中電機系統采用PMSM對拖永磁同步發電機模擬直驅式風力發電實驗平臺。電機參數:額定功率P=2 MW,額定電壓U=690 V,額定轉速nr=17 r·min-1,定子電阻R=0.019 2 Ω,直軸電感Ld=0.004 H,交軸電感Lq=0.005 H,極對數np=30。
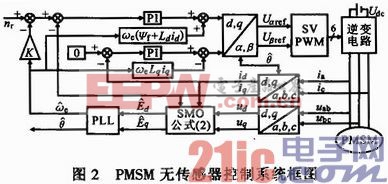
由式(1)可見,d,q軸分量相互耦合,采用前饋解耦控制策略,結合所提控制算法,可得圖2所示無傳感器控制系統框圖,其中![]() ,K=1/π。在此基于以RT-Lab軟硬件平臺為基礎的實時仿真系統,在Matlab下搭建該控制算法的系統仿真模型,然后將搭建好的仿真模型下載到RT-Lab實時仿真系統,經轉接板實現與變頻器之間的通信。
,K=1/π。在此基于以RT-Lab軟硬件平臺為基礎的實時仿真系統,在Matlab下搭建該控制算法的系統仿真模型,然后將搭建好的仿真模型下載到RT-Lab實時仿真系統,經轉接板實現與變頻器之間的通信。
當有傳感器時,轉子位置可測出,電機每次都可平穩啟動;而在無位置系統中,啟動時并不知道轉子位置,若轉子位置與定子軸線之間角度過大,會導致電流過大或啟動失敗。由于電機沒有安裝速度及位置傳感器,整個實驗過程采用開環啟動:①電機啟動時采用常規V/F控制方法,當運行到1 Hz(2 r·min-1)時,待電機穩定運行一段時間后切換到無傳感器控制算法;②由于電機沒有安裝位置/速度傳感器,將開環啟動時給定的頻率換算出轉子位置角,并將其作為參考位置角,讓無傳感器控制算法實時估計、跟蹤。當估計位置角跟蹤上參考位置時,系統會自動切換到無傳感器控制。
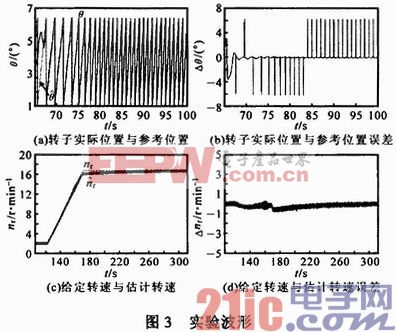
圖3a,b為轉子估計值和參考值之間的變化曲線,由于啟動時電流和電壓不穩定,轉子估計值未較好地估計到實際位置,隨著電機的平穩運行,轉子位置慢慢跟蹤上參考位置,且跟蹤誤差也慢慢減小,實驗結果表明,該算法具有較好的位置估計和跟蹤能力。圖3c,d為電機實際運行過程中跟蹤給定轉速和轉速誤差的變化曲線,當電機穩定運行在2 r·min-1后,系統切換到無傳感器控制算法。當給定值設為17r·min-1時,電機能快速跟蹤設定轉速,且轉速波動也較小(0.5 r·min-1)。可見,該控制算法是有效、可行的。
4 結論
在此基于滑模觀測器魯棒性強、設計簡單的優點,同時結合鎖相環跟蹤三相對稱電源的頻率與相位的特性,構建了一種永磁低速同步電機無傳感器控制系統。通過實驗證明了該控制算法在不同給定轉速下都可較真實地反映出轉子的轉速和位置,且其在低速運行過程中具有較好的穩定性和可行性。















評論