神經模糊控制在SAW壓力傳感器溫度補償中的應用

0 引 言
本文引用地址:http://www.j9360.com/article/159511.htm聲表面波(SAW)技術是一門新興熱門研究課題之一,國內外已有溫度、壓力、加速度等傳感器的相關報道。SAW壓力傳感器借助于它無以倫比的性能,諸如:1)數字號輸出;2)高靈敏度、高分辨力、抗干擾能力強;3)易于大規模集成。正是由于這些自身的優越性,它有著廣泛的應用領域。但美中不足的是SAW壓力傳感器對環境的要求比較苛刻,SAW振蕩器輸出頻率信號隨著壓力、溫度、磁場等外界因素變化而變化,特別是溫度的影響是測量誤差的主要來源,為保證SAW壓力傳感器高準確度和高靈敏度測量,必須進行有效的溫度補償。本文將神經網絡和模糊控制技術相結合,對SAW壓力傳感器進行智能化溫度補償,通過此方法進行的改進,使SAW壓力傳感器能更好地應用到工程領域。
1 溫度補償方案
在傳統的溫度補償中,例如:硬件補償和軟件補償2種方法。但存在著補償電路漂移、局部最優、精度不夠等缺點,無法滿足SAW壓力傳感器補償要求。鑒于此種情況,本文采用了神經模糊控制方法,對SAW壓力傳感器進行智能溫度補償。
神經模糊控制是一種用神經網絡實現的模糊控制的方法。在形式結構上是用多點網絡實現的模糊映射。而神經網絡的非線性和可訓練性說明它可以實現任何一種映射關系。因此,本文利用神經網絡對知識的表達機理,通過學習訓練,實現控制規則基記,從而實現模糊輸入-模糊輸出的映射。神經模糊控制對SAW壓力傳感器溫度-壓力補償模型見圖1。
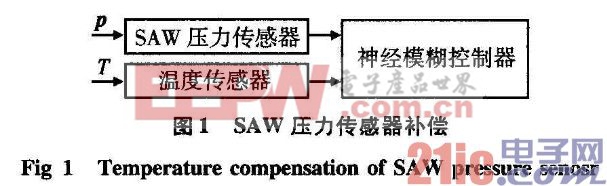
在SAW壓力傳感器后面接神經模糊控制器,把傳感溫度T作為輸入,則神經模糊控制器能直接輸出被測量。
2 實現控制規則的神經網絡
在一般情況下,模糊控制的推理功能是在隸屬函數不變的條件下進行的。在實際運用當中是隨時間的改變而改變的。為了彌補單一模糊控制技術這種不足,特采用神經網絡的學習功能進行隸屬度的調節,實現自動調節功能,以適應實際的需要。本文用含一個隱含層的三層前饋神經網絡,模型如圖2。
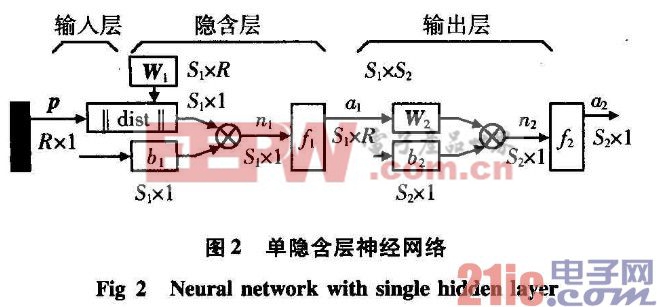
其中,p為輸入矢量,R為輸入矢量維數,S1為隱含層神經元個數,S2為輸出層神經元個數,W1為隱含層神經元權值矩陣,W2為輸出層權值矩陣,b1為隱含層神經元閥值,b2為隱含層神經元閥值,n1為隱含層輸入節點,n2為輸出層節點。f1為S型函數,f2為purelin型函數。神經網絡算法是用于前饋多層網絡的學習算法。如果輸出不能得到期望的輸出,則轉入后向傳播。通過誤差的后向傳播調整各層之間的權系數。反復輸入樣本序列,直至權系數不在改變為止,輸出誤差在規定的范圍之內。算法采用如下改進:1)采用模擬退火法以克服局部最小;2)用奇函數作激勵函數和傳播過程中采用新誤差傳播因子完善該算法收斂性問題。













評論