基于dsPIC30F6010的無刷直流電機的控制系統

2 系統軟件設計
軟件設計主要采用MPLAB IDE 7.40作為開發環境。MPLAB IDE是一種在PC機上運行的軟件,用來為Microchip單片機開發應用程序。軟件設計根據前面介紹的控制策略,硬件系統進行編程、調試,主要完成以下功能:PWM信號的產生、轉子位置檢測、故障引腳的使能、速度和電流的計算等。
2.1 有位置傳感器程序總體結構設計
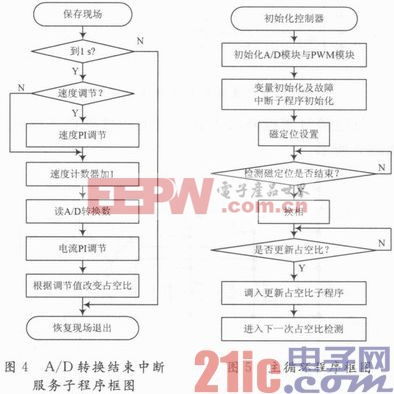
整個控制系統的軟件部分由主程序、A/D中斷服務子程序(其中包括速度調節子程序和電流調節子程序)、電平變化中斷子程序以及故障引腳子程序和中斷陷阱組成。圖4是A/D轉換結束中斷服務子程序流程圖。
2.2 反電動勢過零檢測法程序總體結構設計
主要進行了速度調節、感應電動勢、換相時刻等的電機參數的計算。設計了主循環程序和A/D轉換程序。圖5是主循環程序流程圖。
3 系統測試
本試驗所用電機為珠海運控電機公司生產的方波驅動的三相無刷直流電動機。電機內置的霍爾位置傳感器采用的是SS40系列的SS41霍尼韋爾開關量位置傳感器。其相關參數如下:額定轉速3 000 r/min,額定轉矩0.22 N·m,轉矩系數0.052 2 N·m/A,額定電源電壓24 V,額定功率70 W,額定電流5.18 A,5對極,三相繞組電阻0.488 Ω,三相繞組自感1.19 mH,轉動慣量1.68×10-5kg·m2,電勢系數0.048 2 Vs/rad,電氣時間常數2.44 ms,機械時間常數0.338 ms。
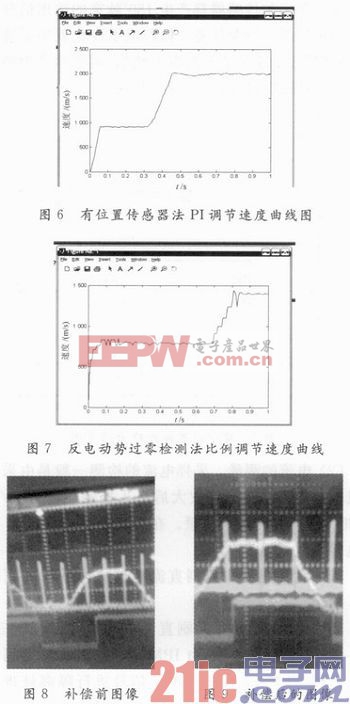
進行了開環實驗和閉環實驗。在閉環實驗中,通過將存儲空間中3 000個點的值整理成圖形得到速度曲線如圖6,圖7所示,其橫軸為時間,縱軸為轉速。圖6可視為一個二階系統,從中可以看出,采用雙比例調節時,電機啟動正常、系統超調量小、轉速精度較高。圖7同樣可視為一個二階系統,從圖中可以看出,采用PI調速系統時,電機啟動平穩、系統超調量小、轉速精度高。
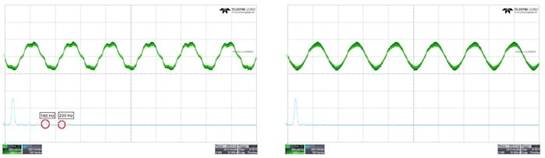
對無刷直流電動機做了補償,利用4通道數字示波器觀測并調整換相點與感應電動勢波形換相點的誤差,并與霍爾傳感器做比較。
在反電動勢過零檢測法中,在補償前圖像如圖8所示,補償后圖像如圖9所示,通過兩者對比可發現,補償后圖像某一相感應電動勢與換相符號之間更為合理,換相點更為精確。其中黃線表示感應電動勢波形,藍線表示采樣換相信號,紫線表示霍爾信號電平變化。
4 結論
采用dsPIC30F6010專用電機控制芯片,其硬件結構簡單、控制能力強、軟件實現方便、控制精度高、實時性強,能實現更為復雜的算法,升級空間較大,其高速的執行性能和豐富的內置資源很好的滿足了高性能無刷直流電動機調速控制系統的設計要求,在電機控制領域具有廣泛的應用前景。開環環境下可以很迅速的達到速度要求。在閉環控制中啟動、運行良好,反應速度快。

霍爾傳感器相關文章:霍爾傳感器工作原理
霍爾傳感器相關文章:霍爾傳感器原理







評論