基于電磁傳感器的智能車控制系統設計

摘要:文中介紹一種基于電磁傳感器路徑識別的智能車控制系統,系統采用Freescale16位單片機MC9S12XS128為核心控制器,利用4個電磁傳感器構成的傳感器陣列采集路面信息,單片機獲得傳感器采集的路面信息和車速信息后控制智能車的舵機轉向,同時對直流電機進行調速,從而實現智能車沿給定的賽道快速平穩的行駛。實驗證明:系統設計可靠,智能車運行良好。
關鍵詞:電磁傳感器;智能車;MC9S12XS128單片機;路徑識別
智能車輛是一個集環境感知、規劃決策、自動駕駛等多種功能于一體的綜合控制系統。“飛思卡爾”杯全國大學生智能汽車競賽以迅猛發展的汽車電子為背景,是涵蓋了控制、模式識別、傳感技術、電子、電氣、計算機、機械以及車輛工程等多個學科交叉的科技創意性比賽。本文以此為背景,基于MC9S12xS128單片機設計了一種智能車系統
1 系統的總體設計方案
1.1 系統的總體構架
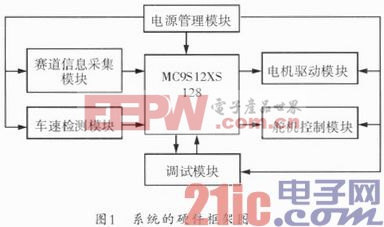
系統的硬件框架如圖1所示。系統以飛思卡爾公司的16位單片機MC9S12XS128為控制核心,由電源管理模塊、賽道信息采集模塊、車速檢測模塊、電機驅動模塊、舵機控制模塊和調試模塊組成。單片機通過電磁傳感器采集道路信息,根據算法分析得出此時的智能車與賽道的偏離狀況,然后再據此采用一定的控制算法控制智能車的舵機轉向和直流電機的速度,從而實現智能車對路徑的自動識別和尋跡。
1.2 MC9S12XS128芯片介紹
MC9S12XS128單片機的特點有:采用增強型的16位S12XCPUV2,片內總線時鐘可達40MHz;具有128 k的Flash,8 k的RAM以及8 k的EEPROM存儲器,具有2個SCI,1個SPI,1個8通道定時器,2個8通道可調轉換精度的A/D口,1個8通道的PWM模塊,91個離散數字I/O口,1個MSCAN模塊。該芯片具有速度快、功能強、成本低、功耗低等特點,能夠實現控制電機轉速、舵機響應、速度采集、路徑識別等功能。
2 系統的硬件部分設計
2.1 電源管理模塊
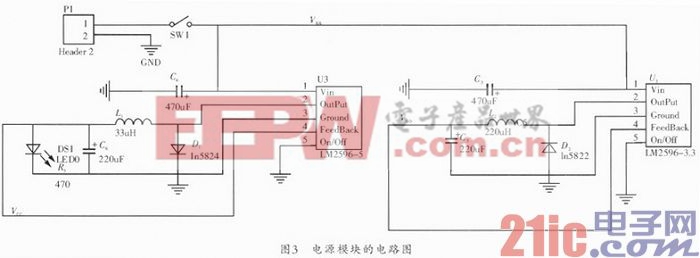
電源管理模塊的功能是對電池進行電壓調節,為各個模塊正常工作提供可靠的工作電壓。設計中除了考慮電壓范圍和電流容量外,還要在電源轉化效率、降低噪音、防止干擾等方面進行優化。本系統小車全部硬件電路的電源采用7.2 V、2000mAh鎳鎘蓄電池提供。由于電路中的不同電路模塊所需要的工作電壓和電流容量各不相同,因此將充電電池電壓轉換成3.3 V、5 V和7.2 V三個檔,各模塊和電源的關系圖如圖2所示。其中采用LM2596—5.0作為5 V的穩壓芯片,采用LM2596—3.3作為3.3V的穩壓芯片,電路圖如圖3所示。

2.2 賽道信息采集模塊
賽路信息采集模塊是系統信息輸入的重要來源,相當于智能小車的“眼睛”,主要負責將小車當前或前面位置的賽道信息輸出給主控芯片處理;本系統使用4個電磁傳感器采集賽道信息。















評論