基于TinyOS平臺的RSSI定位系統設計與實現

如表1所示,當信標節點置于坐標軸上時,數據誤差較大,是因為室內坐標軸所選為墻壁,會發生信號反射現象,室外坐標軸所選為操場周圍的柵欄,也會對無線信號的傳輸產生較大影響。從總體數據看,室內差值最大為2.16 m,最小為0.98 m;室外差值最大為1.56 m,最小為0.81 m。在室外定位中,距離越遠誤差則越大,其原因是室外無線信號干擾導致RSSI值衰減不穩定。
(2)雙側擺放信標節點。信標節點的實際坐標設為(4,1),(8,1),(6,5),盲節點坐標如表3和表4所示。本文引用地址:http://www.j9360.com/article/159403.htm
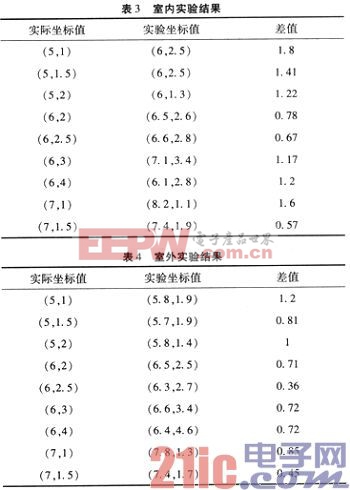
從上表發現,雙側擺放信標節點成等邊三角形時,數據誤差較第一種情況好些,是因為此時信標節點的位置不在墻壁和操場圍欄處,而且盲節點擺放的位置處于三角形之中。從總體數據看,盲節點擺放位置越接近三角形中心時差值越小。這種情形下,室內差值最大為1.8 m,最小為0.57 m,室外差值最大為1.2 m,最小為0.36 m。室外定位中,盲節點位置一直放于三角形之中,RSSI值衰減比第一種情況下要穩定,從而數據差值小些。
(3)隨機擺放信標節點。信標節點的實際坐標設為(3,3),(5,2),(7,1),盲節點坐標如表5和表6所示。


從以上表格發現,在隨機擺放信標節點的情況下,數據誤差較第一種情況小,但比第二種情況大,因為此時盲節點放置的位置更遠,室內物品較多,干擾較大,而室外無線信號干擾,導致RSSI衰減不穩定。從總體數據看,室內差值最大為2.05 m,最小0.85 m;室外差值最大為1.42 m,最小0.58 m。
(4)數據誤差分析。實驗環境為18×18的實驗室內和室外操場,由于實驗環境的局限性,RSSI值會受到多種因素的干擾,實驗室內的設備以及人員走動都會對無線信號產生影響,使得信號發生反射、繞射、受到障礙物阻擋等現象,操場中會存在其他的無線通訊信號,以及鐵欄桿等障礙物會使信號發生不穩定的衰減,導致RSSI值不穩定,產生誤差。另外,每個節點所處的自身環境不相同,對其信號發射影響大小也不相同,但計算時采用同樣的衰減指數,必然存在誤差。
5 結束語
在TinyOS操作平臺上利用Crossbow公司的硬件對無線傳感網RSSI定位算法進行了驗證。通過節點間的收發數據,得到RSSI值,從而計算出盲節點與信標節點之間的距離,最后利用三邊定位算法計算出盲節點的具體位置坐標值。在大型網絡中,此方法仍然實用,此時盲節點會接收到多個信標節點發送的數據,計算出多個距離值,只需提取3個最小的距離即可計算出盲節點的坐標值。








評論