3 焊接機器人控制仿真
采用柔性連接的機械手作為仿真對象,如圖4所示。

圖4 機械手示意圖
利用拉格朗日方法可以導出如下動力學方程:

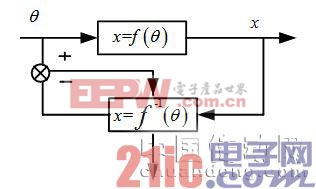
圖5 神經網絡逆向辨識結結構圖
給定正弦激勵信號,運用Matlab程序代碼文件對該控制系統仿真。迭代學習控制曲線和傳統PID控制響應曲線如圖6所示。
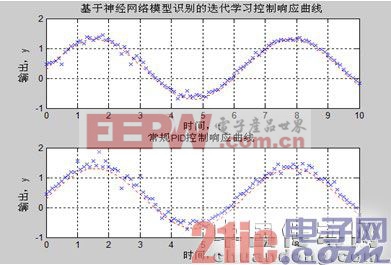
圖6 基于神經網絡模型識別的迭代學習控制響應曲線與常規PID控制響應曲線
4 結論
從仿真結果可以看出,本文提出的基于神經網絡辨識模型迭代控制方案控制效果明顯優于傳統的PID控制,該控制策略跟蹤精度高,超調量小,能夠有效地提高系統的控制精度。同時,優化該控制策略可應用于其他機器人跟蹤控制系統,使系統投入到更廣闊的機器人控制領域。













評論