基于TC1782的永磁同步電機控制系統

2.2.2 硬件設計
本文引用地址:http://www.j9360.com/article/159023.htm依照PMSM主控制器所需要的功能、實際參與控制的對象以及主控制芯片的特點,PMSM電機控制系統主控制器硬件結構如圖4所示。它采用了功能劃分和模塊化的設計思想,并根據功能需求分離成不同的功能模塊。主控制器的主要接口技術參數為:1)14路模擬量輸人通道(12比特);2)6路PWM輸出(帶電平轉換);3)2路CAN通訊接口(支持標定和系統通訊);4)可配置并行或串行通訊的旋變接口電路(AD2S1210);5)數字量輸入(故障檢測與診斷等);6)數字量輸出(急停控制與主繼電器控制等);7)電源系統。
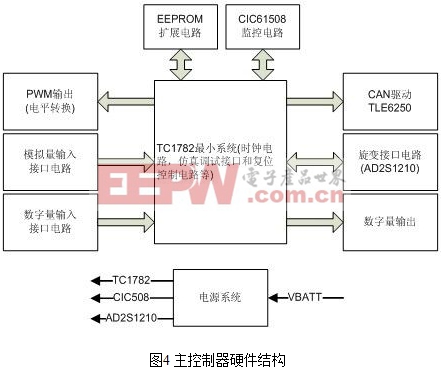
PMSM電機控制系統要求具有較高的安全等級,驅動器對主控制器的故障響應時間有著嚴格的要求,因此主控制器采用了符合ISO26262功能安全規范的監控芯片CIC61508設計監控電路。CIC61508具有可配置的電壓監控輸入,可配置的主CPU任務執行時間和可配置的故障響應時間及輸出,可以實時監控主CPU的供電和軟件的運行狀況,按照預先配置好的故障響應輸出控制其他IC的使能與復位引腳,從而實現系統的功能安全要求。
2.2.3 軟件設計
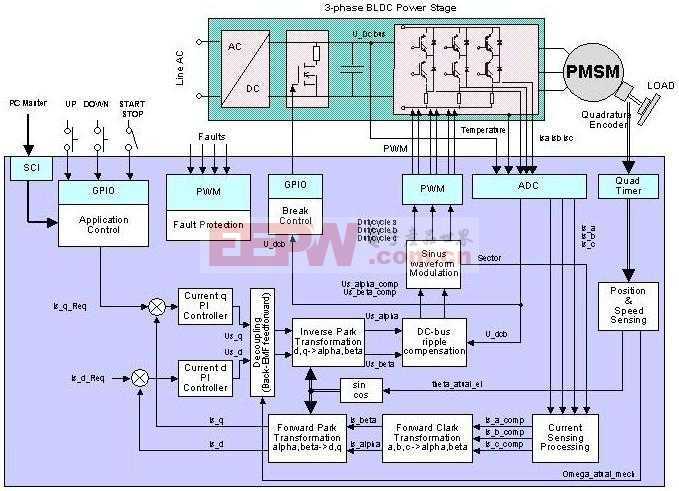
PMSM電機的控制系統方案主要以磁場定向控制FOC為主(圖5), 另外為達到最佳控制效果, 常常幾種控制方案結合運用, 如采用最大轉矩控制和弱磁控制原理(圖6)以實現電機的效率最優和寬范圍的調速方案, 集轉矩控制和PWM 控制于一身的控制方案等[3]
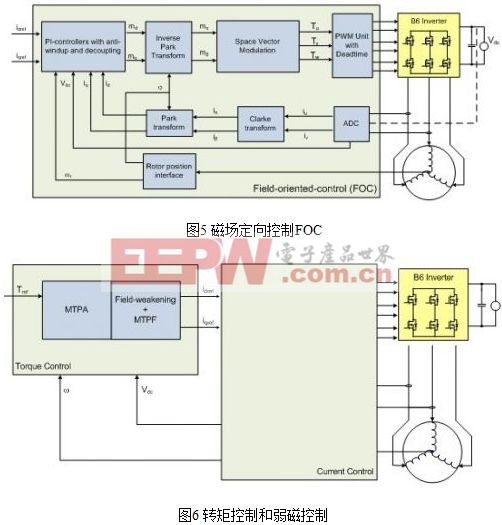
圖5和圖6中的PMSM電機控制系統方案中表明TC1782除了要完成和FOC相關的計算,如Clark,Park,i-Park和SVM[4]計算外,還需要對系統的一些信號進行采集,如相電流,母線電壓,電機位置和轉速等。另外考慮到主控制器參與系統通訊,以及功能安全上的要求,這些都將對單核CPU的負載是一個嚴峻的挑戰。基于以上因素,按照主控制器的功能要求,將主控制器的軟件開發模塊化,分配給TC1782的主CPU和外設協處理器PCP,從而形成如圖7所示的軟件流程結構框架。
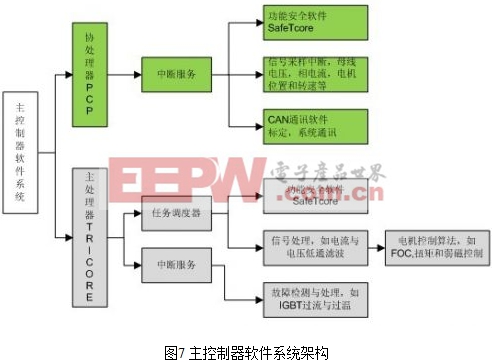
圖7所示的軟件系統架構中,主CPU在一個小型任務調度器的基礎上,分別調用了英飛凌安全功能軟件SafeTcore和PMSM電機控制相關算法軟件,SafeTcore在CPU運行時循環檢測系統的故障,測試項目可以依照要求進行配置,所運行的PMSM電機控制算法采用圖5和圖6中所示的控制策略進行。外設協處理器PCP除了運行安全功能軟件SafeTcore軟件監控主CPU的運行外,還可以處理和通訊相關的中斷和信號采樣中斷等,從而降低主CPU的中斷負載。
矢量控制相關文章:矢量控制原理









評論