AT90CAN的CAN 通信模塊驅動設計及C編程

CAN總線通信較之一般的通信總線而言,其數據通信具有突出的可靠性、實時性和靈活性,應用范圍也早已不再局限于汽車行業,而是擴展到了機器人、數控機床、家用電器等領域。CAN控制器用來實現統一的CAN通信協議。CAN控制器分為兩種:一種是獨立的控制芯片,如SJA1100;另一種是將其集成在微控制器內部,例Atmel公司最新推出的AT90CAN系列單片機。與使用獨立的CAN控制器相比,自身集成了CAN接13的微控制器在簡化硬件電路設計的同時,提高了軟件開發的效率。
本文引用地址:http://www.j9360.com/article/157838.htm1 AT90CAN單片機CAN控制器特性
AT90CAN單片機的CAN控制器能夠兼容CAN2.OA和CAN2.OB通信協議,內部設有120字節的郵箱空間,它由15個MOB(Message Object)與CAN DATA BUFFER組成。MOB用來描述一幀完整的CAN報文信息,每個MOB擁有獨立的工作寄存器組(詳見參考文獻[1],這些寄存器規定了CAN通信報文的幀格式與工作模式。CAN通用控制寄存器里的CANPAGE寄存器為15個MOB規定了相對應的BUFFER地址和指針,用來存放通信時發出或接收到的數據以及保存MOB寄存器組的設置。對MOB的寄存器組進行初始化設置后,CAN控制器根據MOB的不同設置,就可以分別實現數據的發送、接收以及過濾功能,整個工作過程不需要CPU干預,簡化了軟件代碼的編寫。而CPU通過訪問CAN控制器狀態寄存器或者由CAN控制器以中斷的方式通知CPU,即可得到當前通信狀態,從而大大節省了CPU的占用時間。
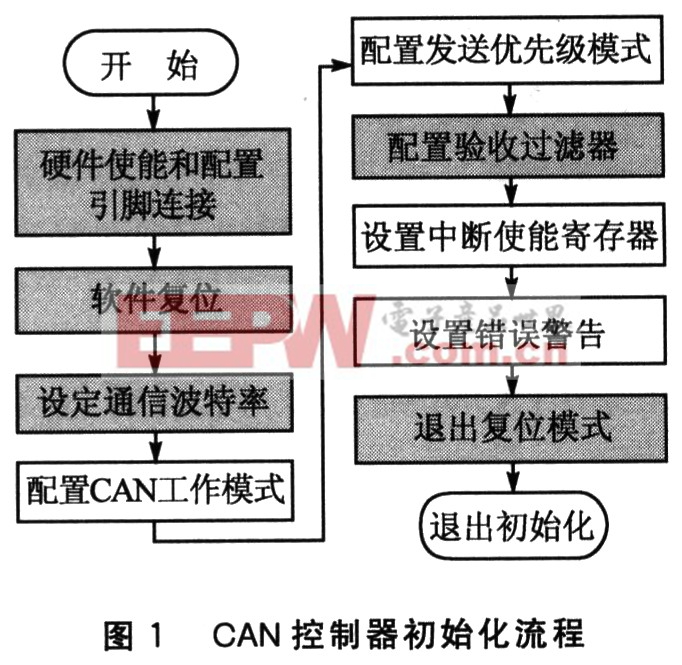
2 CAN控制器的初始化
要實現CAN通信,首先要對CAN控制器進行正確的初始化設置。初始化過程包括對 CPU的引腳功能、CAN通信波特率、中斷優先級和MOB寄存器的設置等。在編寫驅動的過程中,需要注意的是在完成對CANPAGE寄存器的設置后,再進行MOB的設置;否則,MOB的初始值將不能被保存,導致系統初始化失敗。其基本初始化流程如圖1所示。其中陰影部分是必須初始化的部分,其他部分可以根據實際程序功能的需要予以設置。









評論