現場總線CANbus與RS-485之間透明轉換的實現

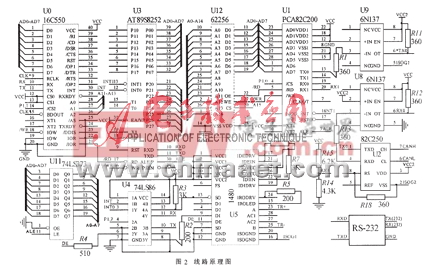
對于那些對總線響應速度要求比較苛刻的場合,可采用雙CPU控制電路,即每個CPU分別負責一端總線的通信事務。數據緩沖區仍采用公用的單口或雙口RAM。相應的控制算法必須增加一些有關對公共數據區的管理操作,在此不做詳述。
以上電路多適用于二種總線并存于同一系統的場合,以實現二種總線之間的有機結合,使新老設備能很好地同時運行,節省系統開支。這種透明轉換電路在已研制的分布式數據采集系統中應用以后,效果良好。
對以上電路稍做修改,即將MAX1480換成MAX232芯片就可設計出一種能在CAN現場總線與RS-232之間實現透明轉換的電路。這種電路可用于那些需要用便攜機與現場設備之間實現通信(如現場調試等)的場合,因為目前便攜機一般只配RS-232接口。另外,如將電路的二個總線端口設計成相同的接口,那么它還可以用在使用同一種總線,但不同的區域卻有不同通信速率的應用場合。
對于那些首次接觸CANBUS技術的開發人員來說,以上電路還是一種很好的端點開發輔助設備,即開發人員只要對該電路設置合適的端口參數,并將用戶電路與之連接好后,開發人員即可在一相對熟悉的環境下專心開發自己的應用電路。
參考文獻
1 SJA1000 Stand-alone CAN controller.Philips Semiconductors,1997; (04)
2 8-Bit Microcontroller with 8K Bytes Flash,AT89S8252.ATMEL,0401D-A-12/97
3 鄔寬明.CAN總線原理和應用系統設計.北京:北京航空航天大學出版社,1996









評論